Бицепс машина — как выполнять упражнение в тренажере для максимального эффекта?
Способов тренировки бицепса существует немало. Это и работа со штангой, гантелями, и работа с фиксацией локтевых суставов, и упражнения на блоках в кроссовере. Но, несмотря на это, в тренажерном зале можно встретить бицепс-машину, созданную специально для тренировки двуглавых мышц плеча. Что она собой представляет и нужен ли этот тренажер – мы узнаем в этой статье.
Содержание
- Что это за тренажер
- Как правильно делать сгибания рук на бицепс в тренажере
- Техника упражнения в бицепс-машине в видео формате
- Рекомендации по внедрению в тренировку.
- Заключение
Что это за тренажер
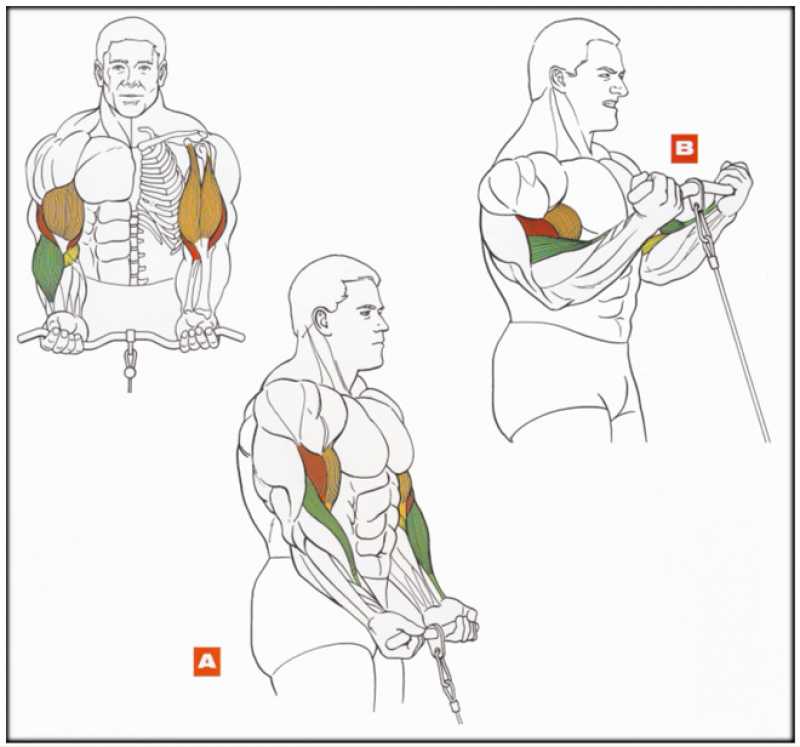
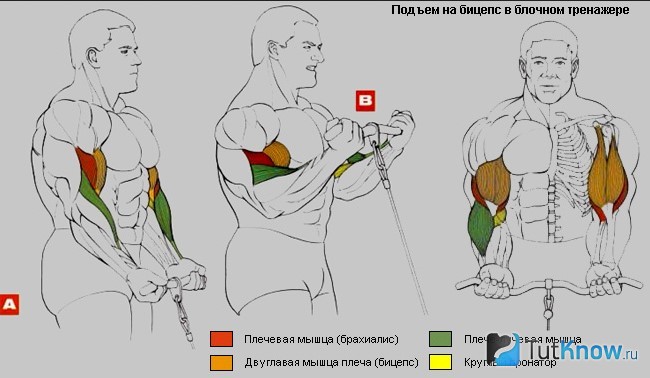
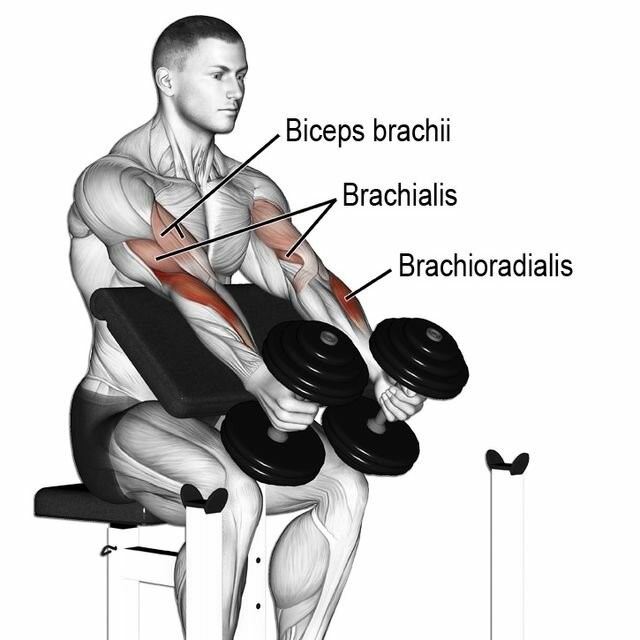
Бицепс-машина – это силовой тренажер для изолированной проработки бицепсов, который позволяет выполнять движения максимально изолировано. Это обеспечивает отсутствие свободного веса в руках спортсмена, так как тренажер имеет силовые блоки или возможность добавления дисков-утяжелителей. Поэтому, выполняя движения в бицепс-машине, отсутствует нагрузка на мышцы, стабилизирующие вес, которые работают при выполнении сгибаний на скамье Скотта. Заменой упражнения в этом тренажере будет тяга нижнего блока с подставленной для упора локтевых суставов скамьей Скотта.
Поэтому, выполняя движения в бицепс-машине, отсутствует нагрузка на мышцы, стабилизирующие вес, которые работают при выполнении сгибаний на скамье Скотта. Заменой упражнения в этом тренажере будет тяга нижнего блока с подставленной для упора локтевых суставов скамьей Скотта.
Разновидностей конструкций несколько. Подавляющее большинство тренажеров основано на системе блоков, но есть и рычажные конструкции. Какая конструкция лучше – сказать трудно, но работать в блочном тренажере, естественно, проще, ведь для изменения рабочего веса не потребуется установка дисков-утяжелителей, так как для изменения веса требуется всего-навсего вытащить фиксатор из отверстия в плитах-утяжелителях и вставить его в нужное отверстие.
Как правильно делать сгибания рук на бицепс в тренажере
Первое, что нужно сделать, это настроить уровень высоты упора по отношению к сидению. Оптимальной высотой является та, при которой спина спортсмена расположена в вертикальном положении и не имеет наклона.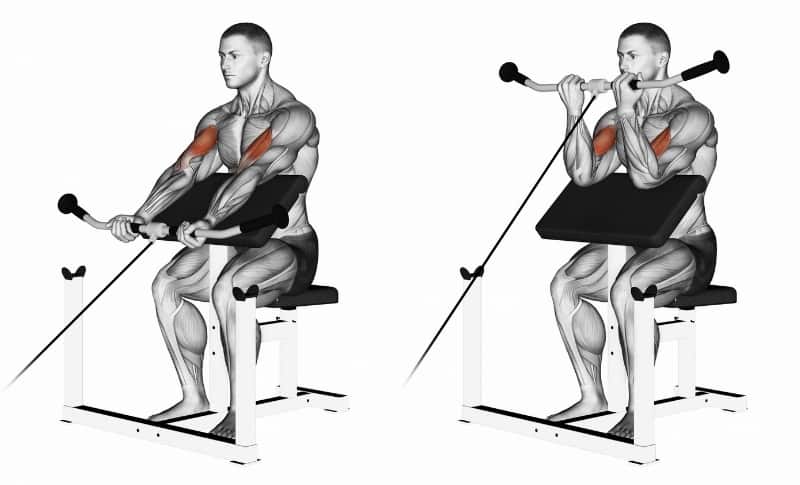
Техника выполнения:
- Подберите оптимальный вес для первого подхода.
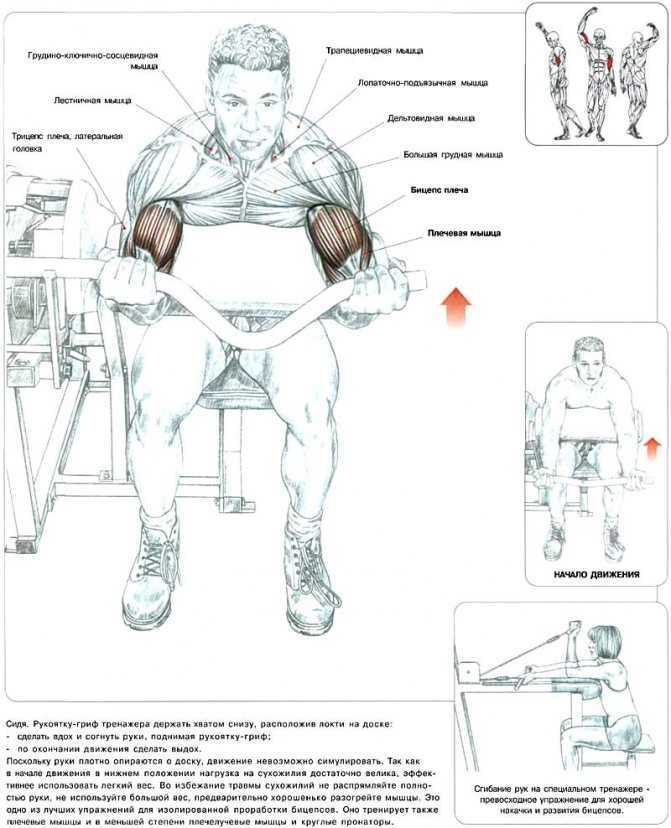
- Захватите гриф или рукояти тренажера, подобрав удобное положение, до того, как сядете. Сначала согните локти, оторвав вес с нижнего положения, и только затем начинайте движение.
- Кисти рук должны быть направлены к себе, а локти – расположены на подушке для упора по уровню ширины плеч. Локти отводить в стороны или сводить вместе не нужно.
- Сгибайте руки на выдохе. Лучше всего в верхней точке движение выдержать секундную паузу, ощутив максимальное напряжение на пике бицепса.
- С выдохом плавно возвращайтесь в исходное положение.
- В нижней точке полностью разгибать локти не нужно. Сохраняйте легкий изгиб и напряжение в мышцах.
- Для форсированных подходов лучше прибегать к помощи партнеров, которые помогут выполнить последние повторения. Именно для форсирования (работа до отказа) этот тренажер подходит идеально.
Техника упражнения в бицепс-машине в видео формате
Рекомендации по внедрению в тренировку.
- Сгибания рук в тренажере выполняются в качестве дополнительного упражнения. Его следует выполнять после упражнения со штангой. Также данный вид сгибаний можно включить в тренировку последним либо же перед такими упражнениями, как «Молот» или сгибания Зоттмана, то есть перед вариантами с гантелями или в кроссовере.
- Тренировать бицепс в тренажере нужно с небольшим весом.
- Оптимальное количество сгибаний составляет диапазон 12-14 повторений. Если тренировка рассчитана на достижение рельефа, то количество повторений можно увеличить до 20.
- В принципе, упражнение можно заменить вариантом сгибаний на скамье Скотта, но этот тип сгибаний не будет полноценным, так как в работу, как говорилось ранее, будут вовлечены и другие мышцы-стабилизаторы.
- Данное упражнение подойдет людям, имеющим проблемы с позвоночником, так как нагрузка при выполнении сгибаний в бицепс-машине минимальная. Упражнение можно выполнять и женщинам, и подросткам, если развитие рельефной мускулатуры является целью тренировок.
- Для достижения лучшего эффекта следует выполнять движения как можно медленнее и концентрированнее.
- После выполнения подхода рекомендуется растягивать двуглавые мышцы плеча, чтобы предотвратить их укорачивание. Подробнее о растяжке мышц рук →
Заключение
Нужно ли использовать упражнение в тренировках, направленных на набор мышечной массы? Бицепс-машина не будет лучшим вариантом для этой цели, а вот для глубокой проработки и создания наилучшей формы бицепсов данный вид сгибаний – действительно хорошее решение! Главным достоинством упражнения, несомненно, считается максимальная изоляция мышц, что является очень полезным для некоторых спортсменов и категории людей, имеющих проблемы с позвоночником. В тренировке на рельеф или на этапе сушки перед соревнованиями количество повторений можно увеличить до 15-20. Бицепс-машина – вполне неплохой вариант для внедрения в тренировку, но чаще всего спортсмены пренебрегают этим тренажером и работают со свободными весами.
В тренировке на рельеф или на этапе сушки перед соревнованиями количество повторений можно увеличить до 15-20. Бицепс-машина – вполне неплохой вариант для внедрения в тренировку, но чаще всего спортсмены пренебрегают этим тренажером и работают со свободными весами.
А также читайте:
Как увеличить пик бицепса?
Почему может не расти бицепс?
работающие мышцы и техника выполнения
Отсортируйте подходящий вам материал:
- Тренировки
- Упражнения
- Питание
- Мотивация
- Здоровье
- Обзоры
- Фитнес-планы
Сгибания рук на бицепс в тренажере
vk_blue twitter_bluewhatsapp_blueУпражнения
К списку упражнений
9,0
Добавить в избранное Убрать из избранного
Бицепс
Тип упражненияСиловые
Оборудование Тренажёр
Уровень Лёгкий
Тип механики Изолирующее
Подписка на новые статьи
Спасибо за подписку!
Добавить
в избранное
Убрать
Отрегулируйте сидение и установите вес. Положите верхнюю часть рук на подставки и возьмитесь за рукоятки. Во время сгибания рук двигайте предплечья по направлению к плечам. Задержитесь на секунду. До конца подхода не разгибайте локти полностью. Держите мышцы в постоянном напряжении.
Положите верхнюю часть рук на подставки и возьмитесь за рукоятки. Во время сгибания рук двигайте предплечья по направлению к плечам. Задержитесь на секунду. До конца подхода не разгибайте локти полностью. Держите мышцы в постоянном напряжении.
Правила выполнения упражнения
- Отрегулируйте высоту сидения и установите желаемый вес. Положите верхнюю часть рук на подставки и возьмитесь за рукоятки. Это исходное положение.
- Движение осуществляется за счёт сгибания локтей. Двигайте предплечья по направлению к плечам.
- Задержитесь на секунду в верхней точке движения и медленно вернитесь в исходное положение.
- Не разгибайте локти полностью до конца подхода. Держите мышцы в постоянном напряжении.
Альтернативные упражнения
8,3
9,5
9,39,2
9,1
9,1
9,0
9,0
Подпишись на рассылку и получи
персональную программу тренировок в подарок!
Выберите пол, уровень сложности и цель занятий.
Мы вышлем на почту программу тренировок специально для вас!
Спасибо! Ваша подписка оформлена
Подписывайтесь на наши страницы в соц. сетях:
Форма будет закрыта через 5 секунд
Что не так с комментарием
Выберите подходящий вариант: Материал для взрослых Оскорбление Пропаганда наркотиков Реклама Экстримизм
Поиск по сайту
Сообщение об ошибке
Стать автором
Обратная связь
Спасибо! Ваше сообщение успешно отправлено.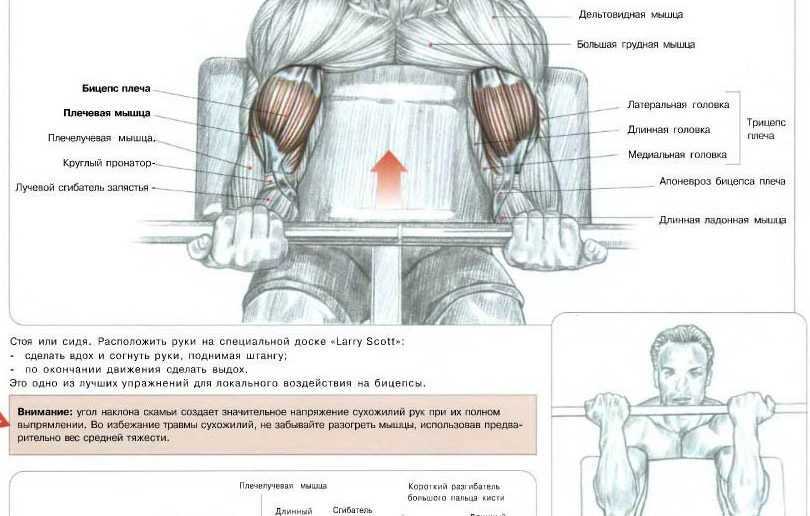
Ваш пол: Мужской Женский
yes Ознакомлен(а) с Политикой конфиденциальности yes Ознакомлен(а) с Правилами пользования
Зарегистрируйтесь на Бодимастере и откройте для себя все возможности сервиса:
- Календарь тренировок
- Личный прогресс
Зарегистрируйтесь на Бодимастере и откройте для себя все возможности сервиса
yes запомнить меня
или
Войти с помощью социальных сетей:
vk googleВведите свою электронную почту и мы вышлем вам ссылку для восстановления пароля.
Тренажер с отягощениями на основе тактильных ощущений и его применение в упражнениях на бицепс 1HapticbasedRT, title={Тренажер с отягощениями на основе тактильных ощущений и его применение в упражнениях на бицепс}, автор = {Джэу Пак, Кённам Ким и Дэхи Хон}, journal={Международный журнал точного машиностроения и производства}, год = {2011}, объем = {12}, страницы = {21-30} }
- Jaewoo Park, Kyungnam Kim, D. Hong
- Опубликовано 4 февраля 2011 г.
- Education
- International Journal of Precision Engineering and Manufacturing
В этом документе представлена конструкция тренажера с отягощениями на тактильной основе и рассматриваются детали схемы управления упражнениями на бицепс. Разработанная тренажерная машина состоит из трех компонентов: 1) аппаратная часть машины; 2) Генератор сопротивления на основе управления импедансом; и 3) Пользовательский интерфейс. Он может включать различные тренировки с отягощениями с учетом биомеханического поведения отдельного пользователя.
View on Springer
Анализ мышечной активности тренажера с отягощениями на тактильной основе по сравнению с тренировкой с гантелями
Результаты показали, что индивидуальная тренировка на тренажере с тактильным сопротивлением более эффективно стимулировала движение мышц во всем диапазоне движения.
Анализ мышечной активности тренажера с отягощениями на тактильной основе в сравнении с тренировкой с гантелями0004
Биология
Результаты показали, что индивидуальная тренировка с помощью тактильного тренажера с отягощениями более эффективно стимулировала движения мышц во всем диапазоне движения.
Упражнение на отведение плеча с помощью тактильного тренажера с отягощениями
Целью данной статьи было провести «индивидуальную тренировку с отягощениями» с помощью тактильного тренажера с отягощениями (HRTM) и сравнить его эффективность с обычным сопротивлением…
Упражнение на отведение плеча на тактильном тренажере с сопротивлением
- Джеу Пак, Кённам Ким, Кунву Ли
Обучение
- 2012
Цель этой статьи заключалась в проведении «индивидуальной тренировки с отягощениями» с тактильный тренажер с отягощениями (HRTM) и сравнить его эффективность с обычным сопротивлением…
Роботизированный тренажер для бицепсов: аппаратное обеспечение, использующее серийный эластичный привод и управление с помощью Disturbance Observer
- Kyungnam Kim, D.
Engineering
IEEE Access
- 2020
Предлагается роботизированный тренажер для бицепса, который создает переменный профиль силы сопротивления и управляет сила взаимодействия, соответствующая профилю через диапазон движения упражнений и представлена новая структура каскадного управления, включающая внутреннюю скорость и внешнее управление силой.
Влияние тренировки с отягощениями Поддержание профиля углового момента в суставе с использованием тактильного тренажера на внутреннюю и внешнюю ротацию плеча
Протокол тренировки с сохранением профиля «угол-крутящий момент» в суставе показал лучшее улучшение внутренней/внешней ротации плеча, чем тренировка с гантелями, и было значительно выше, чем в контрольной группе.
Разработка серии механизмов упругого сопротивления для упражнений и реабилитации
Начальное исследование серии механизмов упругого сопротивления для упражнений и реабилитации, которые могут генерировать различную силу сопротивления с учетом биомеханических характеристик человека путем активного контроля сопротивления во время гребка представил.
Реализация изокинетических упражнений с помощью робота с использованием управления упражнениями по желанию
Основным требованием изокинетических упражнений является надежное управление скоростью, поэтому в этой статье разрабатывается надежный контроллер скорости для соединения робота с использованием наблюдателя возмущений для работы в условиях неопределенной среды, таких как движение человека и механические нелинейности.
Динамическая гантель — новый робот для тренировки мышц с программируемой нагрузкой
Экспериментальные результаты подтверждают эффективность предлагаемой динамической гантели и программируемой нагрузки.
Разработка виртуального симулятора стоматологической скульптуры на основе поверхности с мультимодальной обратной связью точность, стабильность, эффективность компьютера и скорость обновления Из тактильного дисплея можно сделать вывод, что эта виртуальная система, основанная на мультимодальных реальностях, может генерировать устойчивую симуляцию удаления материала из модели человеческого зуба с реалистичными слуховыми, визуальными и силовыми ощущениями.
Разработка и первоначальная оценка интеллектуальной системы тренировки с отягощениями
- A. West, J. Smith, C. S. McLeod
Engineering
- 2009
Сообщается, что предварительные результаты указать, что программные и аппаратные системы способны обеспечивая желаемые возможности срабатывания и обратной связи в реальном времени, и может, при дальнейшем развитии, предоставить широкому кругу пользователей эффективную и действенную альтернативу существующим методам упражнений и тренажерам.
Тактильный интерфейс управления для моторизованного тренажера
Создан тактильный интерфейс для силового тренажера для сгибания рук для модуляции сопротивления «на лету» во время силовых тренировок и реабилитации, и представлены предварительные экспериментальные результаты для вязкостного и инерционного управления законы.
Управление умными тренажерами. I. Постановка задач и неадаптивное управление
- Perry Y. Li, R. Horowitz
Информатика
- 1997
Формулируется задача управления и предлагается структура контроллера, которая удовлетворяет требованиям безопасности и способна заставить пользователя выполнять произвольную стратегию упражнений, если биомеханическое поведение пользователя известно.
Гибридное управление положением/силой манипуляторов
- M. Raibert, J. Craig
Engineering
- 1981
Новый концептуально простой подход к управлению соответствием движения робота-манипулятора, который сочетает в себе информацию о силе и крутящем моменте с представлены позиционные данные для удовлетворения одновременных ограничений положения и траектории силы, заданных в удобной системе координат, связанной с задачей.
О реализации и характеристиках контроля импеданса на роботах с позиционным управлением
В этой статье обсуждается реализация и работа схемы управления импедансом на роботах-манипуляторах с позиционным управлением, а также предлагается очень простой метод, основанный на использовании дополнительных сигналов обратной связи. способ значительно улучшить производительность отслеживания этих контроллеров.
Новая энциклопедия современного бодибилдинга
- Арнольд Шварценеггер, Б. Доббинс
Образование
- 1985
Власть. Скорость. Ловкость. Гордость. Это лишь некоторые из причин, по которым бодибилдинг стал самым быстрорастущим видом спорта в Америке. От гимнастов до футболистов, от игроков в гольф до боксеров, спортсменов…
Контроль импеданса: подход к манипулированию
- Н.
 Хоган
Хоган Инженерия, психология
1984 American Control Conference
900 11 1984
Манипуляции принципиально требуют манипулятор, механически связанный с объектом, которым манипулируют. Рассмотрение физических ограничений, налагаемых динамическим взаимодействием, показывает, что…
Расширенная идентификация параметров для системы движения с линейным приводом с использованием наблюдателя возмущений
- Ю. Пан, Ю. Ши, Р. Хорнг, Ан-Чен Ли
Инженерное дело
- 2009
Новая модель управления системами с трением
Предложена новая динамическая модель трения, которая охватывает большую часть поведения трения, наблюдаемого экспериментально, включая эффект Стрибека, гистерезис, пружинные характеристики сцепления и переменное усилие отрыва.
Надежное управление динамически взаимодействующими системами
- J. Colgate, N. Hogan
Информатика
- 1988
контроллеров действий» и противопоставляет его подходу к Разработка подходов к динамическому взаимодействию с окружающей средой является основополагающей для процесса манипулирования.
Патент США на тренажер-тренажёр с рамой, установленной с возможностью вращения в точке опоры Патент (Патент № 4,822,029, выдан 18 апреля 1989 г.)
ОПИСАНИЕ
Изобретение относится к тренажерам, а именно , к тренажеру-тренажёру.
2. Уровень техники
Тренажеры широко распространены в данной области техники. В связи с появлением в последние годы сознания здоровья тренажеры пользуются спросом. В частности, тренажеры, имитирующие упражнения, требующие чрезмерного пространства, такие как бег трусцой, скалолазание или другие упражнения для тренировки ног. Поскольку для этих упражнений обычно требуется не только большое пространство, такое как спортзал, но и упражнения в неконтролируемой среде, такой как тренировочные поля или улицы, необходимы устройства, имитирующие эти упражнения. Особенно небольшие и портативные тренажеры, которые можно использовать в тренажерных залах или дома.
Поскольку для этих упражнений обычно требуется не только большое пространство, такое как спортзал, но и упражнения в неконтролируемой среде, такой как тренировочные поля или улицы, необходимы устройства, имитирующие эти упражнения. Особенно небольшие и портативные тренажеры, которые можно использовать в тренажерных залах или дома.
Примеры устройств предшествующего уровня техники для имитации упражнений, особенно имитирующих упражнения для ног, включают устройство, раскрытое в DeCloux et al., U.S. Pat. № 4496147; Уилкинсон, патент США. № 4340218; McFee, патент США. № 3970302; Парсонс, патент США. № 3 592 466; и Harrison et al., патент США No. № 3 497 215. Эти устройства, как правило, имеют недостатки в нескольких аспектах. Во-первых, DeCloux et al., Wilkinson и McFee представляют собой, по существу, стационарные тренажеры, в которых пользователь не может имитировать восхождение или бег более чем на две ступеньки. Кроме того, руки пользователя обычно не тренируются; его руки должны держаться за ручки или поручни, чтобы сохранять равновесие на предмете. Далее, устройство, раскрытое в Parsons and Harrison et al. как правило, громоздки и громоздки, и используют сложное оборудование. Кроме того, эти тренажеры могут имитировать только один тип упражнений — упражнения для ног. Пользователи этих устройств также должны использовать свои руки, чтобы надежно удерживать равновесие. Они не способны имитировать другие типы упражнений, например, упражнения для рук.
Далее, устройство, раскрытое в Parsons and Harrison et al. как правило, громоздки и громоздки, и используют сложное оборудование. Кроме того, эти тренажеры могут имитировать только один тип упражнений — упражнения для ног. Пользователи этих устройств также должны использовать свои руки, чтобы надежно удерживать равновесие. Они не способны имитировать другие типы упражнений, например, упражнения для рук.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Основной целью настоящего изобретения является создание тренажера для тренажера, способного моделировать несколько упражнений.
Еще одной целью настоящего изобретения является создание компактного и портативного тренажера для тренажера.
Еще одной задачей настоящего изобретения является создание тренажера для тренажера, который прост по конструкции и прост в эксплуатации.
Для достижения вышеуказанных и других целей настоящее изобретение предлагает тренажер для тренажера, который содержит по меньшей мере два вогнутых элемента, образующих раму; каждый из вогнутых элементов имеет первый конец и второй конец. Кроме того, вращающийся элемент расположен рядом с каждым из первого и второго концов каждого из вогнутых элементов. Предусмотрена однонаправленная транспортирующая цепь с замкнутым контуром, проходящая рядом с каждым из вогнутых элементов, при этом транспортирующая цепь принимается с возможностью вращения первым концевым вращающимся элементом и вторым концевым вращающимся элементом для движения в направлении, определяемом одним из первого и второго концы каждого из вогнутых элементов. Тренажер дополнительно содержит множество перекладин для упражнений, каждая из которых неподвижно закреплена на обеих транспортировочных цепях, при этом перекладины для упражнений обычно устанавливаются перпендикулярно к транспортировочным цепям в предварительно выбранных положениях транспортировочных цепей. Кроме того, каждый из турников имеет два монтажных средства для надежного крепления каждого из турников к транспортировочным цепям, благодаря чему вес пользователя, когда он продвигается по турникам в направлении, противоположном заданному направлению движения тренажера.
Кроме того, вращающийся элемент расположен рядом с каждым из первого и второго концов каждого из вогнутых элементов. Предусмотрена однонаправленная транспортирующая цепь с замкнутым контуром, проходящая рядом с каждым из вогнутых элементов, при этом транспортирующая цепь принимается с возможностью вращения первым концевым вращающимся элементом и вторым концевым вращающимся элементом для движения в направлении, определяемом одним из первого и второго концы каждого из вогнутых элементов. Тренажер дополнительно содержит множество перекладин для упражнений, каждая из которых неподвижно закреплена на обеих транспортировочных цепях, при этом перекладины для упражнений обычно устанавливаются перпендикулярно к транспортировочным цепям в предварительно выбранных положениях транспортировочных цепей. Кроме того, каждый из турников имеет два монтажных средства для надежного крепления каждого из турников к транспортировочным цепям, благодаря чему вес пользователя, когда он продвигается по турникам в направлении, противоположном заданному направлению движения тренажера. транспортирующие цепи, заставляет транспортирующие цепи и прикрепленные к ним перекладины двигаться в заданном направлении, тем самым имитируя упражнение по скалолазанию.
транспортирующие цепи, заставляет транспортирующие цепи и прикрепленные к ним перекладины двигаться в заданном направлении, тем самым имитируя упражнение по скалолазанию.
Другие цели, особенности и преимущества настоящего изобретения станут очевидными из следующего подробного описания наилучшего варианта предпочтительного варианта осуществления вместе с прилагаемыми чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
РИС. 1 представляет собой вид в перспективе тренажера тренажера по настоящему изобретению с вырванными частями;
РИС. 2 — вид сбоку тренажера, показанного на фиг. 1, с оторванными частями;
РИС. 3 представляет собой вид спереди тренажера, показанного на фиг. 1, с оторванными частями;
РИС. 4 представляет собой увеличенный вид в перспективе средства крепления перекладины тренажера тренажера по фиг. 1-3, с оторванными частями;
РИС. 5 — увеличенный вид сбоку средства регулирования скорости тренажера, показанного на фиг.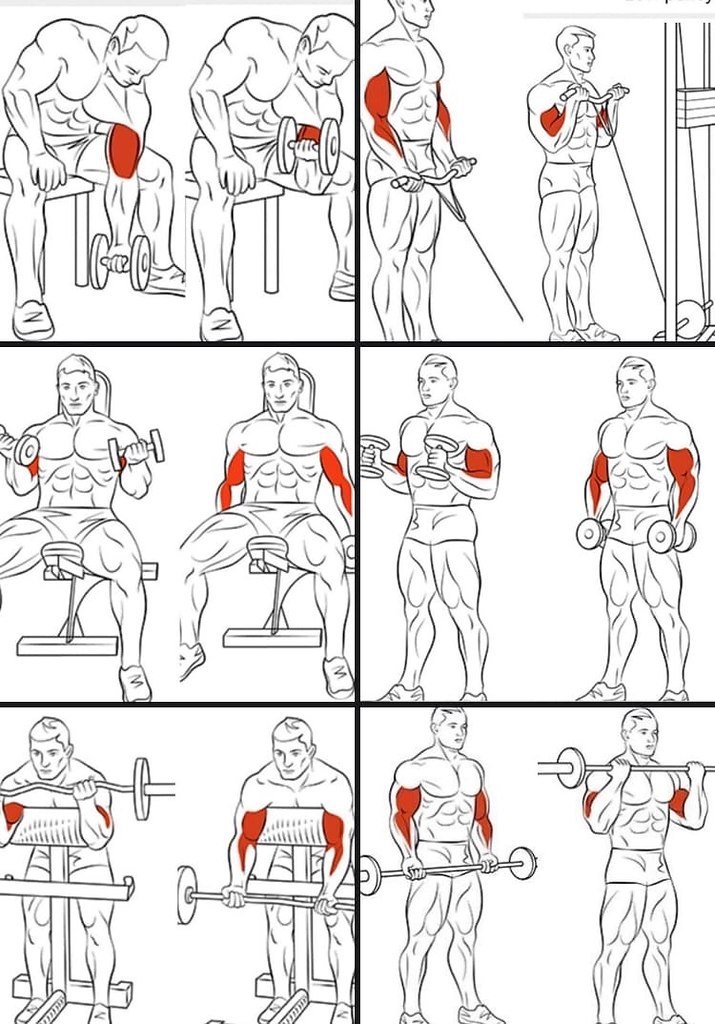 1-3, с оторванными частями;
1-3, с оторванными частями;
РИС. 6 представляет собой вид в перспективе альтернативного варианта осуществления тренажера, показанного на фиг. 1;
РИС. 7 представляет собой вид сбоку тренажера, показанного на фиг. 6, с оторванными частями;
РИС. 8 представляет собой вид спереди тренажера, показанного на фиг. 6, с оторванными частями;
РИС. 9 — увеличенный вид снизу средства регулирования скорости тренажера, показанного на фиг. 6-8 по линии 9-9 на фиг. 7;
РИС. 10А и 10В — увеличенные схематические виды сбоку средства регулирования скорости тренажера, показанного на фиг. 9, с отколотыми участками;
РИС. 11 представляет собой вид в перспективе другого альтернативного варианта осуществления тренажера, показанного на фиг. 1, с оторванными частями;
РИС. 12 представляет собой вид сбоку тренажера тренажера, показанного на фиг. 11;
РИС. 13 представляет собой вид спереди тренажера, показанного на фиг. 11;
РИС. 14 — увеличенный вид тренажера, показанного на фиг. 13, с отломанными участками;
13, с отломанными участками;
РИС. 15 представляет собой увеличенный вид в перспективе средства крепления веревки тренажера тренажера, показанного на ФИГ. 11-14, с вырванными частями;
РИС. 16 представляет собой вид сбоку еще одного варианта осуществления тренажера, показанного на фиг. 1;
РИС. 17 представляет собой вид спереди тренажера, показанного на фиг. 16; и
РИС. 18 — вид сзади тренажера, показанного на фиг. 16.
НАИЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг. 1-3 показано устройство для имитации лазания, обозначенное позицией 12. Устройство или тренажер-тренажер 12 содержит раму 14, множество перекладин 16, установленных на раме 14 с возможностью вращения, и средство 18 регулирования скорости для контроля скорости движения. ступенек 16.
В частности, рама 14 содержит четыре обычно U-образных кронштейна, пара передних кронштейнов обозначена 20F, а пара задних кронштейнов обозначена 20R. Внутри каждого кронштейна расположена замкнутая транспортная цепь 22, которая перемещается в основном в вертикальном направлении. В заданных местах на цепи 22 расположены средства крепления перекладин 24, как лучше всего показано на фиг. 1 и 4. Цепь 22 представляет собой обычное звено цепи, такое же, как те, которые используются для приведения в движение велосипедов.
Внутри каждого кронштейна расположена замкнутая транспортная цепь 22, которая перемещается в основном в вертикальном направлении. В заданных местах на цепи 22 расположены средства крепления перекладин 24, как лучше всего показано на фиг. 1 и 4. Цепь 22 представляет собой обычное звено цепи, такое же, как те, которые используются для приведения в движение велосипедов.
Крепежное средство 24 включает в себя пару колес 26, которые установлены с возможностью вращения на пару колес или монтажных пластин 28А и 28В. Ступенька 16 неподвижно закреплена на колесных пластинах 28А и 28В, которые, в свою очередь, неподвижно установлены на цепи 22. Ступенька 16 и пластины 28А и 28В закреплены на цепи 22 с помощью вала 30. Кроме того, вал 30 неподвижно установлен на адаптивной цепи. звено 32, как лучше всего показано на фиг. 4. Крепежные средства 24, особенно колесо 26, перемещаются внутри передних кронштейнов 20F и задних кронштейнов 20R. Как лучше всего показано на фиг. 1, средства крепления перекладин 24 расположены таким образом, что каждая перекладина 16 перемещается перпендикулярно цепи 22.
Тренажер 12 также содержит пару верхних звездочек 34А и 34В, как лучше всего показано на ФИГ. 1 и 2. Звездочки 34 установлены с возможностью вращения на верхнем кронштейне 36, который, в свою очередь, установлен на кронштейнах 20F и 20R. Каждая из верхних звездочек 34А и 34В приспособлена для приема цепи 22. Кроме того, тренажер 12 содержит пару нижних звездочек 38А и 38В. Нижние звездочки 38А и 38В установлены на нижних пластинах звездочек 40А и 40В, которые, в свою очередь, установлены на кронштейнах 20F и 20R. Каждая из нижних звездочек 38А и 38В приспособлена для приема с возможностью вращения цепи 22.
Как лучше всего показано на ФИГ. 1-3 и 5, средство 18 регулирования скорости содержит тормозное средство, средство тормозного механизма и средство регулировки тормоза. В частности, тормозное средство включает в себя вращающееся тормозное колесо 42, имеющее тормозную поверхность 43 по периметру, бесконечную растяжимую тормозную ленту 52, которая фрикционно контактирует с тормозной поверхностью 43, тормозную пружину 54 и тормозной шкив 56. Тормозной механизм включает тормозной механизм. 44, и звездочку 46. Тормозное колесо 42 и тормозное колесо 44 установлены с возможностью вращения на оси 48. Как лучше всего показано на ФИГ. 5, тормозная шестерня 44 и звездочка 46 находятся в зацеплении друг с другом. В свою очередь, задняя звездочка 46 соединена с возможностью вращения с нижними звездочками 38А и 38В через ось 50. Средство регулировки тормоза включает обычный талреп 58, работа которого хорошо известна специалисту в данной области техники. Как лучше всего показано на фиг. 1-3 трос 60 соединен одним концом с талрепом 58, а другим концом с тормозной пружиной 54, которая, в свою очередь, соединена с тормозной лентой 52. Трос 60 проходит мимо тормозного шкива 56.
Тормозной механизм включает тормозной механизм. 44, и звездочку 46. Тормозное колесо 42 и тормозное колесо 44 установлены с возможностью вращения на оси 48. Как лучше всего показано на ФИГ. 5, тормозная шестерня 44 и звездочка 46 находятся в зацеплении друг с другом. В свою очередь, задняя звездочка 46 соединена с возможностью вращения с нижними звездочками 38А и 38В через ось 50. Средство регулировки тормоза включает обычный талреп 58, работа которого хорошо известна специалисту в данной области техники. Как лучше всего показано на фиг. 1-3 трос 60 соединен одним концом с талрепом 58, а другим концом с тормозной пружиной 54, которая, в свою очередь, соединена с тормозной лентой 52. Трос 60 проходит мимо тормозного шкива 56.
Тренажер-тренажер 12 дополнительно содержит складную страховочную ступеньку 62, пару ножек 64А и 64В, которые, в свою очередь, крепятся к напольному креплению 66. Кроме того, также предусмотрено настенное крепление 68. Настенное крепление 68 может включать в себя пару обычных монтажных проушин 70. Также предусмотрена верхняя страховочная перекладина 72. Кроме того, предусмотрена пара рукояток безопасности, левая из которых обозначена 74, а правая, по существу, представляет собой талреп 58. Кроме того, поперек задних кронштейнов 20R установлена предохранительная стенка 76. Предусмотрено обычное устройство 78 спидометра/одометра.
Также предусмотрена верхняя страховочная перекладина 72. Кроме того, предусмотрена пара рукояток безопасности, левая из которых обозначена 74, а правая, по существу, представляет собой талреп 58. Кроме того, поперек задних кронштейнов 20R установлена предохранительная стенка 76. Предусмотрено обычное устройство 78 спидометра/одометра.
При работе предусмотрена пара цепей 22, причем одна из цепей 22 проходит внутри переднего кронштейна 20F, входит в зацепление с нижней звездочкой 38А, возвращается через задний кронштейн 20R и входит в зацепление с верхней звездочкой 34А. Аналогичным образом вторая цепь 22 проходит через переднюю скобу 20F, нижнюю звездочку 38В, заднюю скобу 20R и верхнюю звездочку 34В. Предусмотрено средство 24 крепления перекладины, позволяющее прикрепить перекладину 16 к цепям 22.
Оператор вращает талреп 58, поддерживая натяжение троса 60, который, в свою очередь, поддерживает натяжение тормозной ленты 52. Тормозная лента 52 растягивается. прикреплена к периметральной тормозной поверхности 43 тормозного колеса 42, которое с возможностью вращения соединено с тормозным механизмом 44 через ось 48. С зубьями тормозного механизма 44 входят в зацепление зубья звездочки 46, которая соединена с возможностью вращения с нижними звездочками 38А и 38В через ось 50. Таким образом, вращение цепей 22 контролируется или регулируется количеством и скоростью вращения звездочек 38А и 38В, которые управляются средством 18 регулирования скорости.0021
С зубьями тормозного механизма 44 входят в зацепление зубья звездочки 46, которая соединена с возможностью вращения с нижними звездочками 38А и 38В через ось 50. Таким образом, вращение цепей 22 контролируется или регулируется количеством и скоростью вращения звездочек 38А и 38В, которые управляются средством 18 регулирования скорости.0021
При использовании оператор должен сначала встать на предохранительную ступеньку 62. Его руки держат предохранительную рукоятку 74 и талреп 58. В этот момент оператор поворачивает талреп 58, чтобы отрегулировать натяжение предохранительного ремня 52, что влияет на вращение тормоза 42. Затем оператор ставит одну ногу на самую нижнюю перекладину 16. Если тормозное колесо 42 недостаточно натянуто, т. е. недостаточное трение между тормозной поверхностью 43 и тормозной лентой 52, он быстро отжимает самую нижнюю перекладину до безопасного уровня. ступенька 62. Таким образом, предохранительная ступенька 62 предназначена для предотвращения травм при недостаточном натяжении, вызывающем слишком быстрое перемещение цепей 22 и перекладин 16.
После регулировки талрепа 58 до соответствующего натяжения оператор, все еще держась за предохранительную рукоятку 74 и талреп 58, может подняться на тренажере 12 аналогично подъему по лестнице. Когда оператор ступает вверх на верхнюю соседнюю перекладину 16, его вес заставляет перекладины 16 и, в свою очередь, цепи 22 двигаться вниз. Цепи 22 перемещаются в направлении вниз, когда они затянуты в передние кронштейны 20F, и в направлении вверх в задние кронштейны 20R. Положение оператора относительно земли остается относительно неподвижным. Оператор также может подняться на тренажере 12, положив руки на ступеньки 16, дополнительно имитируя подъем по лестнице.
Предохранительная ступенька 62 выполняет еще одну функцию безопасности, поскольку она предотвращает зацепление ног оператора за нижние звездочки 38А и 38В. Вертикальная стенка 76 представляет собой еще один элемент безопасности, заключающийся в том, что конечности оператора не могут запутаться в движущихся вверх перекладинах 16, которые перемещаются между задним кронштейном 20R.
Как показано на ФИГ. 6-8 показан альтернативный вариант тренажера 12 тренажера, обозначенный 112. Поскольку тренажер 112 тренажера включает в себя элементы, идентичные элементам тренажера 12, к цифрам, обозначающим соответствующие элементы тренажера, добавляется цифра «1». 12. Кроме того, поскольку многие элементы симулятора 112 выполняют свои функции аналогично своим аналогам в симуляторе 12, эти элементы симулятора 112 не будут далее описываться, если не указано иное.
Тренажер-тренажер 112 содержит, как правило, U-образные кронштейны 120F и 120R, образующие раму 114, по которой перемещаются цепи 122. Кроме того, тренажер 112 включает в себя верхние звездочки 134А и 134В и нижние звездочки 138А и 138В. Рама 114 установлена на треугольной напольной опоре 163, треугольных боковых рамах 164А и 164В и напольных рамах 166А и 166В. Треугольные боковые рамы 164А и 164В соединены осью 165. Кроме того, рама 114 установлена на раме 163 с возможностью вращения через ось 165. Кроме того, тренажер 112 включает в себя верхнюю поперечину 136 и нижнюю поперечину 162.
Кроме того, тренажер 112 включает в себя верхнюю поперечину 136 и нижнюю поперечину 162.
Кроме того, тренажер 112 тренажера содержит средство 118 регулирования скорости. Средство 118 регулирования скорости включает в себя, как лучше всего показано на ФИГ. 9, 10А и 10В, тормозной рычаг 141, обычный барабанный тормоз 142 и множество пружин 154А и 154В. Барабанный тормоз 142 и нижние звездочки 138А и 138В соединены с возможностью вращения осью 150. В свою очередь, тормозной рычаг 141 также соединен с осью 150. Кроме того, тормозной рычаг 141 установлен на правом треугольном креплении 164В, как лучше всего показано на фиг. 7, 9, 10А и 10В. Пара пружин 154А соединяет нижнюю поперечину 162 с левой треугольной рамой 164А, как лучше всего показано на ФИГ. 9, а пара пружин 154В соединяет нижнюю поперечину 162 с правой треугольной рамой 164В, как лучше всего показано на ФИГ. 9, 10А и 10В. Поперечина 162 предназначена для приведения в действие барабанного тормоза 142. Кроме того, средство 118 регулирования скорости включает в себя две пары пластин 156А и 156В, ограничивающих вращение.
При использовании, когда оператор встает на нижнюю поперечину 162, его вес заставляет нижнюю поперечину 162 двигаться вниз. Как лучше всего показано на фиг. 10В, эта сила заставляет тормозной рычаг 141 вращаться, что, в свою очередь, приводит в действие барабанный тормоз 142. Барабанный тормоз 142 представляет собой обычный тормоз барабанного типа, работа которого хорошо известна специалисту в данной области техники. Затянутый барабанный тормоз 142 останавливает любое вращение вала 150, так что нижние звездочки 138А и 138В больше не вращаются. Таким образом, цепи 122 и соответствующие им ступени 116 останавливают свое движение вниз. По мере того, как оператор поднимается вверх на тренажере 112 и особенно когда его центр тяжести проходит за ось 165 треугольной опоры 163, крутящий момент, который он оказывает на раму 114, уменьшается. Ось 165 является точкой опоры рамы 114. Затем пружины 154А и 154В втягиваются в свои положения, как показано на ФИГ. 10А, т.е. снимается натяжение тормозного рычага 141. Это, в свою очередь, освобождает барабанный тормоз 142, позволяя цепям 122 вращаться на нижних звездочках 138А и 138В. Пластины 156А и 156В ограничения поворота предусмотрены для предотвращения поворота кронштейнов 120F и 120R слишком далеко от их обычно наклонного положения.
Это, в свою очередь, освобождает барабанный тормоз 142, позволяя цепям 122 вращаться на нижних звездочках 138А и 138В. Пластины 156А и 156В ограничения поворота предусмотрены для предотвращения поворота кронштейнов 120F и 120R слишком далеко от их обычно наклонного положения.
Имитатор 112 также включает в себя вертикальную защитную пластину 176 и устройство 178 спидометра-одометра.
Как лучше всего показано на ФИГ. 11-13 показан третий вариант осуществления тренажера, обозначенный позицией 212. В частности, тренажер 212 содержит четыре ножки 264, которые расположены вертикально к поверхности земли, не показаны; пара обычно U-образных кронштейнов 220; и множество стержней 216, которые проходят между кронштейнами 220. Кронштейны 220 расположены параллельно поверхности земли. Кроме того, тренажер 212 содержит две пары колес 234 и 238 с желобками, по которым перемещаются тросы 222. Стержни 216 прикреплены нормально к канатам 222. Расширяющиеся направляющие 240 предусмотрены рядом с каждым из желобчатых колес 234 и 238.
При использовании оператор встает на поперечины 262, как лучше всего показано на РИС. 12-13, и руками держится за ближайшую перекладину 216. Затем он продвигается к центру, а также к самой нижней перекладине 216С. Когда оператор хватается за следующий стержень 216, он тянет этот стержень 216 в самое нижнее центральное положение, т. е. заставляя этот стержень стать стержнем 216C. Таким образом, когда оператор качается с одного стержня 216 на другой, канаты 222 вращаются вокруг желобчатых колес 234 и 238, так что относительное положение оператора остается практически неизменным, т.е. он свисает под самым нижним стержнем 216С.
Как лучше всего показано на РИС. 15, на внешних концах каждого стержня 216 имеется не показанное радиальное отверстие, через которое вставляется трос 222. На выходе из отверстия веревка 222 завязывается узлом 223, чтобы закрепить веревку. На входе в отверстие предусмотрено кольцевое кольцо 224.
Симулятор 212 можно расположить таким образом, чтобы один конец устройства, например, конец с колесиками 234 с канавками, был слегка приподнят для дополнительной имитации этого сложного упражнения с махами руками.
Еще один вариант осуществления тренажера, обозначенный номером 312, показан на РИС. 16-18. Имитатор 312 содержит пару передних опор 364 и пару задних опор 365, которые расположены вертикально относительно поверхности земли. В верхней части передних стоек 364 установлена с возможностью вращения пара передних звездочек 338, а в верхних частях задних стоек 365 установлена пара задних звездочек 334. Кроме того, между передними ножками 364 и задними ножками 365 установлены пара верхних кронштейнов 320T и пара нижних кронштейнов 320L. Кронштейны 320T и 320L располагаются параллельно поверхности земли. Как лучше всего показано на фиг. 16, кронштейны 320T и 320L в предпочтительном варианте осуществления расположены так, что один их конец выше другого. Цепь 322 проходит внутри каждой пары верхних кронштейнов 320T и нижних кронштейнов 320L и зацепляется с одной передней звездочкой 338 и одной задней звездочкой 334. Аналогичная цепь 322 проходит через другую пару верхних кронштейнов 320T и нижних кронштейнов 320L и звездочки 338. и 334. На паре цепей 322 горизонтально установлено множество стержней 316. Стержни 316 прикреплены к цепям 322 с помощью средства 324 крепления стержня. Поскольку тренажер 312 тренажера включает в себя элементы, идентичные элементам тренажера 12, 112 и 212 соответствующие элементы симулятора 312 не будут подробно описаны.
и 334. На паре цепей 322 горизонтально установлено множество стержней 316. Стержни 316 прикреплены к цепям 322 с помощью средства 324 крепления стержня. Поскольку тренажер 312 тренажера включает в себя элементы, идентичные элементам тренажера 12, 112 и 212 соответствующие элементы симулятора 312 не будут подробно описаны.
В частности, поперек передних стоек 364 установлено множество поперечин 362. Задние стойки 365 в предпочтительном варианте осуществления представляют собой опорные трубы, которые вставлены в более крупные опорные трубы 367, которые, в свою очередь, шарнирно прикреплены к кронштейнам 369. Поперечные болты 370 предусмотрена для крепления базовых труб 367 к кронштейнам 369. Монтажные кронштейны 369 и передние ножки 364 установлены на основании 366. Как лучше всего показано на фиг. 18, в нижней части задних ножек 367 расположена поперечина 371, которая, в свою очередь, соединена с вертикальным элементом 373. В вертикальный вал 373 ввинчен резьбовой элемент 375. В свою очередь, резьбовой элемент 375 соединен с верхней поперечиной 377, которая в свою очередь соединяет задние стойки 365.