Тяга к поясу нижнего блока: описание и техника упражнения
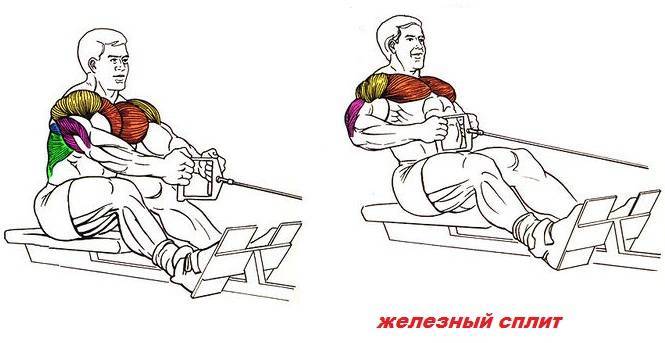
Тяга к поясу нижнего блока является базовым упражнением. Оно активирует довольно много мышечных групп. При этом целевой являются широчайшие мышцы спины. А второстепенные группы представлены: грудными мускулами, бицепсом, плечом, нижними мышцами спины, квадрицепсами и разгибателями бедра, а также предплечьем.
Считается, что данное упражнения лучше всего подходит тем, кто хочет сделать свою спину шире. Наиболее эффективным вариантом упражнения считается модификация с применением раздвоенной рукояти, которая позволяет держать кисти параллельно друг другу. С точки зрения анатомии, упражнение относится к горизонтальным тягам. Оно выполняется в положении сидя и по природе движения напоминает греблю.
А теперь давайте поближе познакомимся с упражнением под названием тяга к поясу нижнего блока.
Подготовка
Данное упражнение требует выполнения некоторых условий:
- Высота скамьи или сидения должна быть такой, чтобы трос при выполнении тяги был параллелен полу.

- Тело ни в коем случае не должно сползать вперед, а значит, у ступней должна быть удобная опора.
- Рукоятки могут быть как фиксированными на общем основании, так и отделенными друг от друга.
- Так или иначе, желательно, чтобы при выполнении тяги ладони смотрели друг на друга.

Итак, для начала нужно сесть на скамью и взять в руки рукоятки. Затем стоит подтянуть их к себе до тех пор, пока спина не примет вертикальное положение, с сохранением ее естественного изгиба в районе лопаток. При этом руки должны быть ровными. Это и есть исходное положение.
Теперь нужно вдохнуть, задержать дыхание и начать тягу:
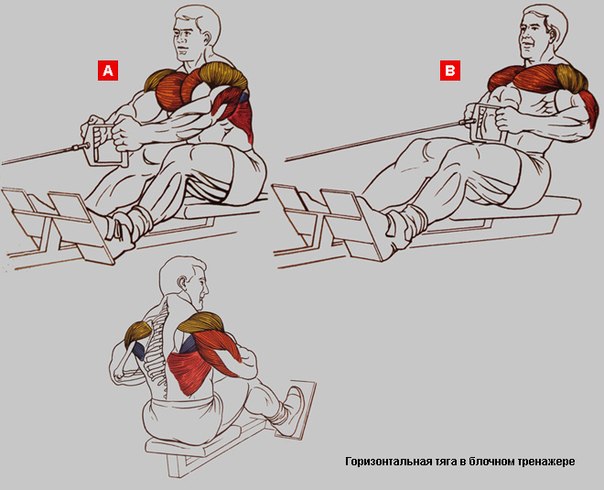
- Первая фаза движения (она же промежуточная) заканчивается в момент, когда локти окажутся на одной линии с туловищем, а угол изгиба локтевого сустава будет близок к прямому.
- Дальше рукоять тянется чуть ближе к поясу таким образом, чтобы локти вышли назад за пределы туловища. Здесь начинается вторая фаза.
- Из данного положения нужно максимально сильно отвести плечи назад и постараться сдвинуть лопатки.
 Чем более сильного сокращения широчайших мышц спины вы добьетесь на этой стадии, тем эффективнее будет упражнение.
Чем более сильного сокращения широчайших мышц спины вы добьетесь на этой стадии, тем эффективнее будет упражнение. - Затем нужно быстро выдохнуть и вернуть рукоятки в исходное положение, сохраняя спину прямой и неподвижной.
При работе с большим весом можно использовать кистевые ремни.
Ошибки и нюансы
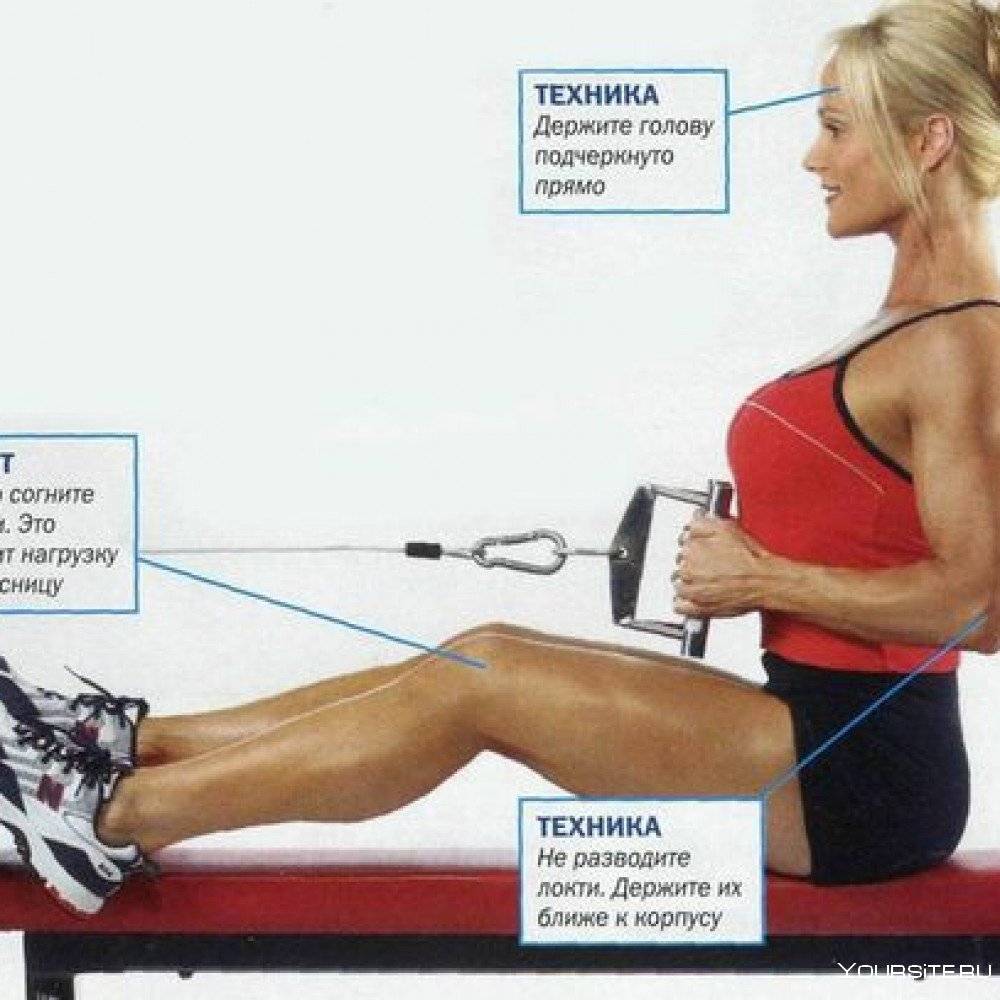
Выполняя такое упражнение, как тяга к поясу нижнего блока, нужно следить, чтобы локти были прижаты к телу. Если они расставлены в стороны, ни к чему хорошему это не приведет. Именно благодаря прижатым к туловищу локтям и максимально отведенным назад лопаткам данное упражнение позволяет хорошо нагрузить широчайшие мышцы спины, а точнее, их нижнюю часть.
Если развести локти в стороны, нагрузка сместится на верхнюю часть спины, средние пучки трапециевидных мышц и ромбовидные мускулы. Таким образом, упражнение просто не будет выполнять своей главной задачи.
Туловище, как уже говорилось, должно на протяжении всего движения быть вертикальным. Однако небольшие отклонения в начале и в конце движения допустимы. Они не должны превышать 10 градусов. Ограниченная амплитуда туловища обуславливается необходимостью в подстраховке от травм нижней части позвоночника.
Они не должны превышать 10 градусов. Ограниченная амплитуда туловища обуславливается необходимостью в подстраховке от травм нижней части позвоночника.
Упражнение можно делать и с прямой перекладиной, то есть ладони будут смотреть вниз, а не друг на друга. Если, взявшись за перекладину, направить локти в стороны и вверх, то в работе будут задействованы средняя часть трапециевидной мышцы, задняя часть дельтовидной мышцы и ромбовидный мускул.
Если перекладина имеет посредине изгиб, а ее концы обращены назад, то, направив локти вниз и к туловищу, можно практически полностью исключить из работы дельты. А вот если локти направить вверх и в стороны, то дельты будут участвовать в движении весьма активно. Оба варианта хорошо нагружают трапецию и ромбовидную мышцу.
Получается, что тяга к поясу нижнего блока при разных положениях локтей и использовании различных перекладин позволяет глубоко проработать все мышцы спины: широчайшие, ромбовидные, трапециевидные, круглые и, наконец, задний пучок дельтовидных мышц плеча.
Заключение
Как можно заметить, тяга нижнего блока к поясу рукой, а точнее, руками, несмотря на кажущуюся простоту, имеет ряд важных нюансов. Лишь осознав их и поработав над правильной техникой, можно достичь хороших результатов. Альтернативой данного упражнения является тяга штанги к поясу в положении стоя в наклоне. В спортивной литературе часто можно встретить фразу «тяга нижнего блока/штанги к поясу» и, несмотря на то, что эти упражнения схожи с анатомической точки зрения, они сильно отличаются друг от друга в плане техники.
Тяга нижнего блока к животу узким хватом в Химках: 516-товаров: бесплатная доставка, скидка-13% [перейти]
Партнерская программаПомощь
Химки
Каталог
Каталог Товаров
Одежда и обувьОдежда и обувь
СтройматериалыСтройматериалы
Здоровье и красотаЗдоровье и красота
Продукты и напиткиПродукты и напитки
Текстиль и кожаТекстиль и кожа
Детские товарыДетские товары
ЭлектротехникаЭлектротехника
Сельское хозяйствоСельское хозяйство
Мебель и интерьерМебель и интерьер
ПромышленностьПромышленность
Вода, газ и теплоВода, газ и тепло
Все категории
ВходИзбранное
231 000
Тяга нижнего блока Realleader M2-1018 Производитель: Realleader
ПОДРОБНЕЕ163 800
Тяга нижнего блока Protrain 61A13-80 Производитель: Protrain
ПОДРОБНЕЕ114 800
Тяга нижнего блока Impact CT2025 Производитель: Impact, Вес стека: 91 кг
ПОДРОБНЕЕ163 800
Тяга нижнего блока Protrain 61A13-80 Производитель: Protrain
ПОДРОБНЕЕ237 300
Тяга нижнего блока Protrain 7313 Производитель: Protrain
ПОДРОБНЕЕТяга блочная Hawk IR-038-1 Производитель: Hawk, Тип комплектующей: трос, Группа мышц: руки, спина
ПОДРОБНЕЕ32 990
Опция Верхняя тяга Body Solid LA-78/GLA-78 Производитель: Body Solid, Группа мышц: грудь, плечи,
ПОДРОБНЕЕ63 000
Вертикальная тяга + разгибание ног + тяга ARMS075 s-dostavka Производитель: V-Sport
ПОДРОБНЕЕ177 161
A3033 Гребная тяга (горизонтальный блок) Long Pull (109 кг), DHZ Производитель: DHZ, Вес стека: 109
ПОДРОБНЕЕ146 235
JOHNS Горизонтальная тяга Johns CT2025 Производитель: Johns, Тип нагрузки: грузоблок, Упражнения:
ПОДРОБНЕЕТяга блочная Onhillsport R5 Производитель: Onhillsport, Группа мышц: руки
ПОДРОБНЕЕ259 000
Верхний блок/тяга к поясу AnyFit PS02-96 Вес стека: 52 кг
ПОДРОБНЕЕ-21%
-65%
-19%
-67%
Узкий хватНижний блокРукоятка для тяги к животу (узкий параллельный хват) Voitto, обрезиненная, A-5057 Вес: 2.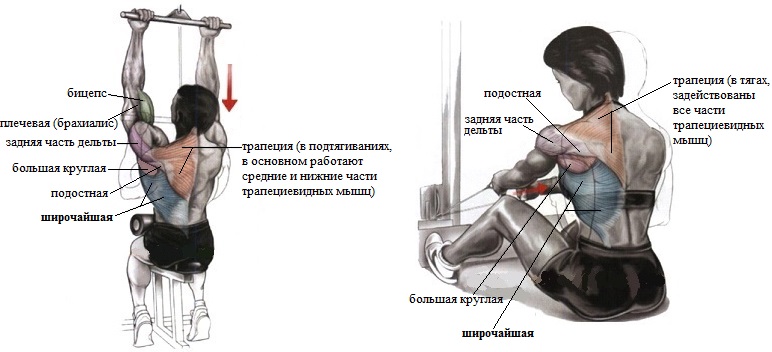 00000000
00000000
Рукоятка для тяги к животу CT504 Производитель: Без бренда, Назначение: для тяги, Тип
ПОДРОБНЕЕРукоятка для тяги к животу (узкий параллельный хват) ZSO Производитель: ZSO, Назначение: для тяги,
ПОДРОБНЕЕРучка для тяги к животу МВ 5.02 Производитель: MB Barbell, Назначение: для тяги, Тип комплектующей:
ПОДРОБНЕЕРукоятка для тяги на трицепс и тяги к животу Производитель: HASTTINGS, Тип комплектующей: рукоятка
ПОДРОБНЕЕРукоятка для тяги к животу (узкий параллельных хват) Тип комплектующей: рукоятка, Вид рукояти для
ПОДРОБНЕЕРукоятка для тяги к животу обрезиненная Hasttings Digger HD61F1B Производитель: HASTTINGS,
ПОДРОБНЕЕРукоятка для тяги к животу (узкий параллельный хват), ZSO-6006 Производитель: ZSO, Тип
ПОДРОБНЕЕРукоятка для тяги к животу Hasttings Digger HD61F1B Производитель: HASTTINGS, Назначение: для тяги,
ПОДРОБНЕЕРукоятка для тяги к животу металлическая узкий параллельный хват Производитель: Original FitTools,
ПОДРОБНЕЕРучки для тяги Torneo A-100PH, Черный Цвет: черный, Производитель: Torneo, Назначение: для тяги
ПОДРОБНЕЕ-14%
3 709
4290
Рукоятка для тяги к животу (узкий параллельный хват) OFT FT-RSBG
ПОДРОБНЕЕ2 страница из 18
Тяга нижнего блока к животу узким хватом
Проблемы со шкивом
На этой странице я собрал коллекцию задач со шкивами, чтобы помочь вам лучше понять системы шкивов. Необходимые уравнения и справочная литература для решения этих проблем приведены на странице трения, странице равновесия и странице второго закона Ньютона.
Необходимые уравнения и справочная литература для решения этих проблем приведены на странице трения, странице равновесия и странице второго закона Ньютона.Проблема №1
Брусок массой м тянут с помощью шкива с постоянной скоростью по поверхности, наклоненной под углом θ . Коэффициент кинетического трения равен 9.0009 μ k , между блоком и поверхностью. Определить тяговое усилие F . Ответ: мг cos θ μ k + мг sin θ
Проблема № 2
Два блока массой м и м висят на одном шкиве, как показано на рисунке. Определить ускорение блоков. Не учитывать массу шкива.
Подсказка и ответ
Проблема № 3
Два блока массой м и м соединены шкивом, как показано на рисунке. Коэффициент статического трения между блоком и поверхностью составляет мкс с .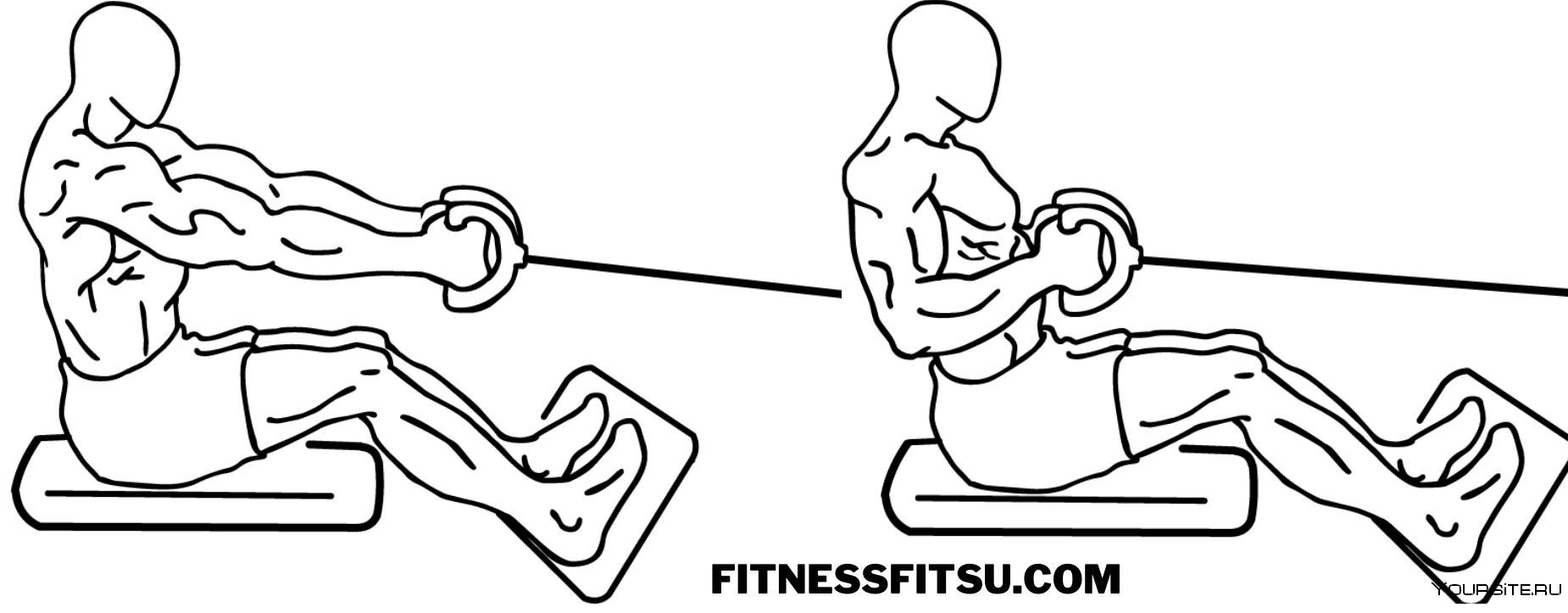 Какова максимальная масса m , чтобы не происходило скольжения? Ответ: максимум м = м мк с
Какова максимальная масса m , чтобы не происходило скольжения? Ответ: максимум м = м мк с
Проблема № 4
Два блока массой м и M соединены шкивом, как показано на рисунке. Коэффициент статического трения между блоком и поверхностью составляет мкс с . Какова минимальная и максимальная масса M , чтобы не происходило скольжения?
Подсказка и ответ
Проблема № 5
Два блока массой м и м соединены шкивом, как показано на рисунке. Коэффициент статического трения мк s , между блоками и поверхностью. Какова максимальная масса m , чтобы не происходило скольжения? Ответ: Максимум м = М μ с /(sin θ − cos θ μ с 9001 0 )
Проблема № 6
Два блока массой м и м соединены шкивом, как показано на рисунке. Коэффициент статического трения между левым блоком и поверхностью равен 9.0009 µ с1 , а коэффициент трения покоя между правым блоком и поверхностью равен µ с2 . Сформулируйте математическое неравенство для условия отсутствия скольжения. Неравенств может быть больше одного.
Коэффициент статического трения между левым блоком и поверхностью равен 9.0009 µ с1 , а коэффициент трения покоя между правым блоком и поверхностью равен µ с2 . Сформулируйте математическое неравенство для условия отсутствия скольжения. Неравенств может быть больше одного.
Подсказка и ответ
Проблема № 7
Блок массой м тянут с помощью двух шкивов, как показано, с постоянной скоростью вдоль поверхности, наклоненной под углом
Подсказка и ответ
Проблема № 8
Блок массой м поднимается с постоянной скоростью с помощью двух шкивов, как показано на рисунке. Определить тяговое усилие F . Не учитывать массу шкивов.
Подсказка и ответ
Проблема № 9
Блок массой M поднимается с постоянной скоростью с помощью шкивов, как показано на рисунке.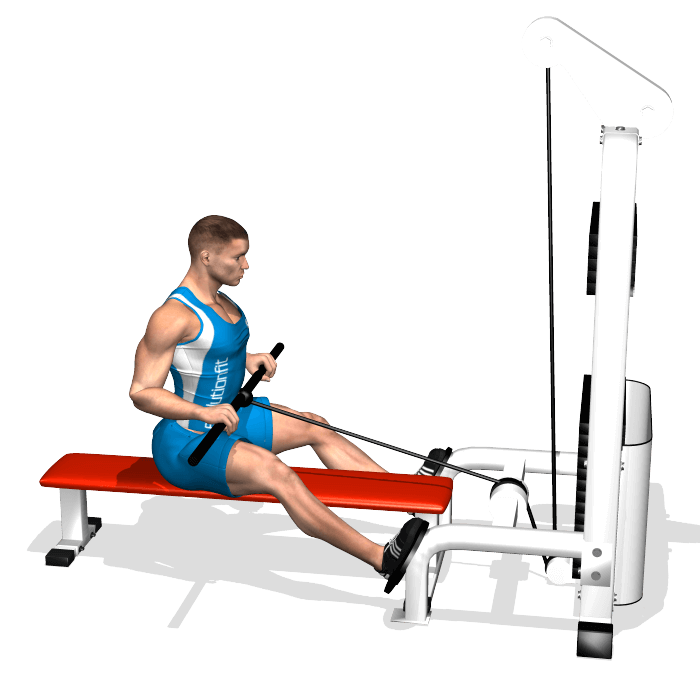 Определить тяговое усилие F . Не учитывать массу шкивов.
Определить тяговое усилие F . Не учитывать массу шкивов.
Подсказка и ответ
Советы и ответы на эти проблемы со шкивами будут даны далее.
Советы и ответы по проблемам со шкивом
Подсказка и ответ на Задачу №2
Это называется машиной Этвуда и обычно используется для демонстрации на уроках физики.
Примените второй закон Ньютона к блоку слева. У нас есть Mg − T = млн лет (принимая нисходящее направление за положительное). Примените второй закон Ньютона к блоку справа. Имеем мг — Т = — мА (ускорение двух блоков имеет противоположные знаки, так как один движется вверх, а другой вниз). Объедините эти два уравнения, и мы сможем найти выражение для ускорения блоков.
Ответ: a = ( M − m ) г / ( M + m )
Подсказка и ответ на Задачу №4
Для максимальной массы M блок находится на грани соскальзывания вниз по склону. Это означает, что
Это означает, что
При минимальной массе M блок находится на грани соскальзывания вверх по склону. Это означает, что Mg sin θ − T + Mg cos θ μ s = 0, где T 90 010 = мг . Мы можем рассчитать минимум M из предыдущего уравнения.
Ответ: Минимум M = m /(sin θ +cos θ μ с ), максимум M = м /(sin θ −cos θ μ с )
Подсказка и ответ на Задачу №6
Это сложная задача! Мне потребовалось некоторое время, чтобы понять это!
Под некоторым углом θ 1 > θ max1 блок M соскользнет вниз сам по себе, если к нему не привязана веревка.
Известно, что θ max1 = atan( μ s1 ) и θ max2 = atan( μ с2 ).
If θ 1 ≤ θ max1 и θ 2 ≤ θ max2 , то скольжение не происходит. Осталось рассмотреть еще три случая.
Случай 1:
θ 1 > θ макс.1 и θ 2 ≤ θ макс.2 9 0015 .
Примените уравнение равновесия к блоку M , в котором он находится на грани соскальзывания вниз. Имеем: Mg sin θ 1
 (Обратите внимание, что система естественным образом «устанавливается», так что натяжение каната T , необходимое для предотвращения скольжения блока, является минимально возможным). При T < T min1 блок соскальзывает вниз. Из этого уравнения получаем T мин1 = Mg sin θ 1 − Mg cos θ 1 мк с1 . Назовите это уравнение (1).
(Обратите внимание, что система естественным образом «устанавливается», так что натяжение каната T , необходимое для предотвращения скольжения блока, является минимально возможным). При T < T min1 блок соскальзывает вниз. Из этого уравнения получаем T мин1 = Mg sin θ 1 − Mg cos θ 1 мк с1 . Назовите это уравнение (1).Нет необходимости рассматривать блок M скольжение вверх, так как это невозможно для θ 2 ≤ θ max2 (что означает, что блок m не может скользить вниз, что означает, что он не может тянуть блок М вверх).
T min1 должен быть обеспечен блоком м и не должен превышать максимальное натяжение каната, которому может противостоять блок м и не подтягиваться по склону. Это максимальное натяжение каната можно определить из следующего уравнения равновесия, примененного к блоку м : мг sin θ 2 + мг cos θ 2 90 009 мк с2 − Т max2 = 0, откуда T max2 = мг sin θ 2 + мг cos θ 2 мк с2 . Назовите это уравнение (2).
Назовите это уравнение (2).
Для без скольжения T мин1 ≤ T
M sin θ 1 − M cos θ 1 μ s1 9001 5 ≤ м sin θ 2 + м cos θ 2 мк с2
Случай 2:
θ 1 ≤ θ макс.1 и θ 2 > θ макс.2 9 0015 .
То же, что и случай 1, по симметрии. Следовательно, окончательное неравенство для этого случая:
м sin θ 2 − м cos θ 2 μ s2 9001 5 ≤ M sin θ 1 + M cos θ 1 μ с1
Случай 3:
θ 1 > θ макс. 1 и θ 2 > θ макс.2 90 015 .
1 и θ 2 > θ макс.2 90 015 .
Блоки будут скользить вместе в одном или другом направлении. Чтобы определить направление, мы должны сначала рассчитать результирующую силу, тянущую вниз каждый блок вдоль соответствующих наклонов под действием силы тяжести. Мы делаем это следующим образом:
Для блока M , F net1 = Mg sin θ 1 − Mg cos 9000 9 θ 1 μ с1 . И F net1 > 0, так как θ 1 > θ max1 .
Для блока м , F net2 = мг sin θ 2 − мг cos θ 2 мк с2 . И F net2 > 0, так как θ 2 > θ max2 .
Теперь нам нужно рассмотреть три дополнительных случая. Окончательные неравенства для этого случая будут даны в этих трех подслучаях следующим образом.
Случай 3A:
Если F net1 = F net2 блоки не будут скользить.
Случай 3B:
Если F net1 > F net2 , то F net1 ≤ мг sin θ 2 + мг cos θ 2 μ s2 без скольжения. Обратите внимание, что F net1 равно натяжению каната, и это натяжение каната является минимальным, необходимым для предотвращения скольжения блока M по склону.
Следовательно, для отсутствия скольжения: M sin θ 1 − M cos θ 1 μ s1 ≤ м 9 0010 sin θ 2 + м cos θ 2 мк с2
Случай 3C:
Если F net2 > F net1 , то F net2 ≤ Mg sin θ 1 + Mg cos θ 1 μ s1 для отсутствия скольжения. Обратите внимание, что F net2 равно натяжению каната, и это натяжение каната является минимальным, необходимым для предотвращения скольжения блока м по склону.
Обратите внимание, что F net2 равно натяжению каната, и это натяжение каната является минимальным, необходимым для предотвращения скольжения блока м по склону.
Отсюда для отсутствия скольжения: м sin θ 2 − м cos θ 2 μ с 2 ≤ M sin θ 1 + M cos θ 1 мк с1
Готово!
Подсказка и ответ на Задачу №7
Примените к блоку условие статического равновесия. Имеем 2 F − мг sin θ − мг cos θ μ k = 0. Член 2 F 9 0010 исходит из силового анализа, в котором мы видим, что есть два отрезки веревки одинаково натягиваются на блок. Затем мы решаем это уравнение для F .
Ответ: F = (1/2) мг (sin θ + μ k cos θ )
Подсказка и ответ на Задачу №8
Примените к блоку условие статического равновесия. У нас есть 2 F − мг = 0. Член 2 F получен из анализа силы, в котором мы видим, что есть два сегмента веревки, одинаково натягивающие блок. Затем мы решаем это уравнение для F .
У нас есть 2 F − мг = 0. Член 2 F получен из анализа силы, в котором мы видим, что есть два сегмента веревки, одинаково натягивающие блок. Затем мы решаем это уравнение для F .
Ответ: F = мг /2
Подсказка и ответ на Задачу №9
При ближайшем рассмотрении мы видим, что два нижних шкива удерживаются четырьмя отрезками веревки. Натяжение веревки считается одинаковым по всей ее длине (хорошее предположение для веревок в целом, поскольку они мало весят). Три из четырех отрезков веревки расположены вертикально, а оставшийся отрезок веревки находится под небольшим углом к вертикали. Но для простоты вычислений мы можем считать его строго вертикальным. Поскольку мы пренебрегаем массой шкивов, натяжение четырех отрезков веревки должно равняться весу массы, чтобы выполнялось условие статического равновесия. Следовательно, 4 F − Mg = 0. Затем мы решаем это уравнение для F .
Ответ: F = Mg /4
Бонусная задача
Ленточный конвейер, несущий агрегат, показан на рисунке ниже. Двигатель вращает верхний ролик с постоянной скоростью, а остальные ролики могут вращаться свободно. Лента наклонена под углом θ . Чтобы удерживать ремень в натянутом состоянии, к ремню подвешен груз массой м , как показано на рисунке.
Двигатель вращает верхний ролик с постоянной скоростью, а остальные ролики могут вращаться свободно. Лента наклонена под углом θ . Чтобы удерживать ремень в натянутом состоянии, к ремню подвешен груз массой м , как показано на рисунке.
Найдите точку максимального натяжения ремня. Вам не нужно его вычислять, просто найдите место и объясните причину.
Вы можете получить решение для этого в формате PDF. Он доступен по этой ссылке
Вернуться на страницу Вопросы по физике
Вернуться на домашнюю страницу Real World Physics Problems
Регулировка натяжения ремня (MK3/MK3S/MK3S+/MK4) | База знаний Prusa
Актуально для :MK2.5MK2.5SMK3MK3SMK3S+MK4
Последнее обновление 3 месяца назад привести к сбоям в работе принтера и препятствовать правильной печати. Это может привести к сдвигу слоя, появлению ореолов или другим аномалиям печати, таким как получение неправильной формы вместо идеального круга при печати цилиндра. Ремень оси Y расположен под нагревательным столом, ремень оси X перемещает печатающую головку. Все регулировки выполняются шестигранным ключом на 2,5 мм.
Ремень оси Y расположен под нагревательным столом, ремень оси X перемещает печатающую головку. Все регулировки выполняются шестигранным ключом на 2,5 мм. Проверка натяжения ремня
На MK3/S/+ запустите самопроверку или проверку ремня в меню «Калибровка» на ЖК-дисплее. Затем проверьте ЖК-меню -> Поддержка -> Статус пояса. Вам нужен номер от 260 до 290 (275~) . Чем меньше число, тем туже натянут ремень. Представьте, что это фиктивное количество зубов в обращении.
Для MK2.5 и MK2.5S отличный способ проверить правильность натяжения ремня — распечатать этот измеритель натяжения для ремней GT2. Другой способ — использовать метод, описанный в этом шаге руководства по сборке, чтобы проверить, правильно ли натянут шкив и не слишком ли ослаблен ремень. Удерживайте вал двигателя оси X плоскогубцами (воспользуйтесь плоской частью вала), чтобы зафиксировать его на месте ( фиолетовый кружок ), затем попробуйте переместить экструдер вручную.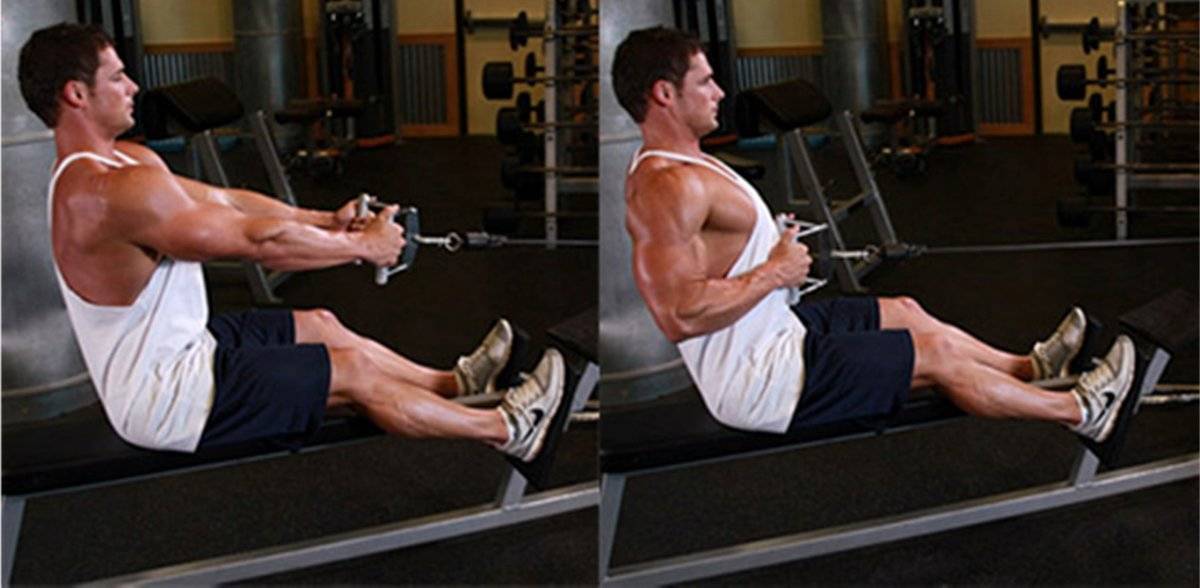 Лента не должна провисать в результате нажатия на экструдер. Та же процедура может быть применена для проверки шкива оси Y и ремня.
Лента не должна провисать в результате нажатия на экструдер. Та же процедура может быть применена для проверки шкива оси Y и ремня.
Ремень оси X
Незначительные регулировки MK3S
Ослабьте два передних винта и убедитесь, что справа от них есть место для перемещения ( желтые кружки ). Помогая вращению двигателя рукой, затяните винт M3x18 в верхней части двигателя на конце X ( фиолетовая стрелка ).
После каждого или двух оборотов проверяйте натяжение ремня, сжимая их вместе. Для оптимальной работы ремень должен сжиматься пальцами с некоторым усилием (зеленые стрелки). Переместите экструдер до упора на концевой ролик X и проверьте натяжение ремня посередине оси X.
Незначительные регулировки MK3S+, MK4
- Слегка отпустите все винты, удерживающие двигатель, иначе «натяжитель» не сработает, так как двигатель должен двигаться (левый рисунок).
- С помощью шестигранного ключа начните затягивать винт на задней стороне двигателя с Х-образной головкой, но после каждого или двух оборотов проверяйте натяжение ремня (правый рисунок).
- Когда вы добьетесь оптимального натяжения, снова затяните винты (левый рисунок).
Большие регулировки MK3/S/+
Если небольшой регулировки недостаточно, необходимо отрегулировать ее на держателе ремня. Он находится на задней части экструдера и требует небольшой разборки.
Сначала снимите два верхних винта с держателя мотора, чтобы ремень немного провисал и им было легче манипулировать.
- Отрежьте стяжки на задней части экструдера ( красные стрелки ), которые крепят провода хотэнда и , которые крепят обертку кабеля.
- Отвинтите 4 винта, обведенных на рисунке ниже.
- Осторожно снимите заднюю панель, убедившись, что провода не повреждены, и поверните всю пластину влево или вправо.

- Теперь у вас есть доступ к местам крепления ремней. Поставьте отметку на ремне ручкой или маркером как можно ближе к пластиковой части, чтобы вы знали, как он был отрегулирован. Теперь выньте ремень из крепления и переместите его на 1-2 зуба.
- Установите заднюю панель на место, затяните винты, начиная с центрального для выравнивания, затем наденьте новые стяжки.
- Снова затяните винты на x-двигателе, чтобы закрепить его. При необходимости отрегулируйте его сильнее.
Большие регулировки MK4
- Ослабьте три указанных винта, закрывающие Х-каретку. Осторожно выньте заднюю крышку X.
- Теперь у вас есть доступ к месту крепления ремня. Поставьте отметку на ремне ручкой или маркером как можно ближе к пластиковой части, чтобы вы знали, как он был отрегулирован. Теперь выньте ремень из крепления и переместите его на 1-2 зуба.

Ремень оси Y
Незначительные корректировки
На передней панели корпуса принтера, за ЖК-модулем, вы найдете распечатанный натяжитель ремня оси Y. Он удерживается двумя винтами M3X10 (, фиолетовая стрелка, ), проходящим через переднюю панель.
Если у вас есть зазор между натяжной частью и передней пластиной рамы ( синие стрелки ), вы можете натянуть ремень с помощью шестигранного ключа на 2,5 мм, повернув винты по часовой стрелке ( фиолетовая стрелка ), закрывая пробел.
Проще всего получить доступ к винтам снизу, переместив принтер к краю стола так, чтобы ЖК-модуль выступал наружу. Теперь у вас есть доступ к болтам снизу ЖК-модуля.
Большие регулировки
Если небольшой регулировки недостаточно, вы должны отрегулировать ее на держателе ремня. Существует два основных типа держателей ремня оси Y: регулируемый и фиксированный. Регулируемый держатель ремня был представлен в первом квартале 2019 года. , с S-обновлением для оригинальной Prusa MK3, а также присутствует на оригинальной Prusa MK4. Регулировки для этого объясняются в « Method 1 ». Для более ранней модели Original Prusa MK3 следуйте « Method 2 » для фиксированного держателя ремня.
, с S-обновлением для оригинальной Prusa MK3, а также присутствует на оригинальной Prusa MK4. Регулировки для этого объясняются в « Method 1 ». Для более ранней модели Original Prusa MK3 следуйте « Method 2 » для фиксированного держателя ремня.
Способ 1. Регулируемый держатель ремня
Оригинальный Prusa MK4 имеет другой дизайн, чем на изображениях, но процедура такая же.- Отсоедините принтер от сети и положите его сбоку от блока питания.
- Под кареткой кровати вы найдете держатель для ремня. Ослабьте правый винт, повернув его против часовой стрелки ( оранжевый круг левое изображение).
- Поверните винт, проходящий через две половины держателя ремня ( фиолетовая стрелка правое изображение). Поверните по часовой стрелке , чтобы натянуть ремень, сдвинув две половинки вместе ( синие стрелки ).
- При правильном натяжении снова закрепите правую половину держателя ремня, повернув винт из шага 2 по часовой стрелке ( оранжевый кружок левое изображение).
Способ 2 — Фиксированный держатель ремня
- Отсоедините принтер от сети и положите его сбоку от блока питания.
- Отсоедините натяжитель ремня, чтобы облегчить управление ремнем ( фиолетовые стрелки ). Полное отсоединение натяжителя может и не понадобиться, но это облегчит регулировку ремня на следующем шаге.
- Поставьте отметку на ремне, чтобы знать, насколько вы его перемещаете. Теперь выньте ремень из верхнего слота и переместите его на 1-2 зуба (, синяя стрелка, ), прежде чем вставить его обратно в слот (, зеленые стрелки, ).
Ваше крепление на ремне может выглядеть немного по-другому, поскольку это другая итерация, но процедура остается прежней.
- Закрепите натяжитель ремня двумя винтами M3x10 через раму ( фиолетовая стрелка ).

