Рекорд скорости лошади, какую максимальную скорость развивает лошадь
новости27.06.2023
Пополнение размерного ряда популярных ботинок и сапог из натуральной кожи для верховой езды
Ботинки «Sofiya» с молнией спереди, ботинки «Olga» со шнуровкой, а также давно зарекомендовавшие себя сапоги «Champion», «Favorit» и «Top Rider».
Подходящую для себя обувь вы можете найти в разделе «Обувь» нашего каталога.
05.06.2023
Новое поступление бриджей для верховой езды уже на сайте
Появился хороший повод заглянуть в наш интернет-магазин и сделать заказ — красивые и удобные бриджи для выступлений и для занятий верховой ездой.
Элегантные и практичные новинки, которые помогут сделать ваши занятия еще более комфортными.
Подобрать подходящий вам размер вам поможет наша таблица размеров.
05.06.2023
Поступление детских ботинок
Главная / Помощь / Статьи и обзоры / Какова максимальная скорость лошади
31. 08.2018
08.2018
Почти всем копытным травоядным в дикой природе приходится спасаться бегством от хищников. Выживание зависит от реакции и скорости передвижения. Лошади не исключение. В условиях дикой природы они должны быть быстрыми. Домашние же лошади избавлены от необходимости бороться за жизнь, но всё равно нуждаются в ежедневном движении. Их природную скорость человек использовал и использует в своих целях в разное время. Сначала служа быстрым наземным видом транспорта, постепенно лошади стали скорее просто символом скорости. Скачки, соревнования — вот современная стихия, где рысаки проявляют всю свою природную склонность к быстрому движению. Быстрые лошади это престиж для их владельцев. Не зря мощь мотора машин измеряют в лошадиных силах.
У лошадей существуют разные виды аллюров. Среди них медленная ходьба, рысь, иноходь, галоп. Шагом лошадь идём от 3,5—4,5 км/ч до 5—7 км/ч, это зависит от специализации породы. На прямой дистанции без препятствий галопом в среднем лошадь развивает скорость от 40 до 48 км/ч.
Быстрота передвижения меняется в зависимости от породы. Тягловые породы предназначены не для быстрой езды, а для того чтобы перевозить грузы и использоваться в тяжёлой работе, поэтому их главным качеством должна быть выносливость. Шагом тяжеловозы идут от 4 до 6 км/ч. Средняя скорость галопа такой лошади до 12—15 км/ч. Поддерживать подобный темп лошади тягловых пород могут недолго.
Максимальная зафиксированная скорость лошади на дистанции четверть мили — 69,69 км\ч. Этот скоростной рекорд принадлежит лошади по имени Бич Рэкит. Другой рекордсмен в беге на короткую дистанцию Сиглеви Слейв — полмили он проскакал без наездника со скоростью 69,3 км/ч. В беге с наездником одержал над всеми верх по скорости на дистанции в полторы мили жеребец Джон Генри. Его показатели движения были в среднем 60,67 км/ч. Примечательно, что все рекордсмены принадлежат к английским породам.
← Назад к спискуЧитайте также:
интересное
Bionic Boots. Или как бегать на олимпийских скоростях с использованием высоких технологий / Хабр
«Быстрее, выше, сильнее!», – теперь каждый, кто обут в Bionic Boots может поставить олимпийский рекорд по бегу. И даже оспорить первенство с такими профессиональными атлетами, как Усэйн Болт.
И даже оспорить первенство с такими профессиональными атлетами, как Усэйн Болт.Bionic Boots – это высокотехнологичная обувь, которая может позволить человеку без значительных усилий достичь скорости 25 миль в час (40 км/ч). Эта скорость характерна для медленного движение автомобиля. Для сравнения: Усэйн Болт, самый быстрый человек в мире, поставил рекорд 27,44 миль в час (44 км/ч), в то время как средняя его скорость составляет 37,58 км/ч.
Bionic Boots — детище изобретателя из Сан-Франциско Кэхи Сеймура. На недавнем мероприятии Maker Faire, которое прошло в Нью-Йорке, он продемонстрировал возможности своей последней версии Bionic Boots.
Кэхи работает над гаджетом уже несколько лет, выпустив десятки прототипов в процессе изобретения. На личном сайте, Кэхи Сеймур, называет своё изобретение транспортным девайсом 21 века.
Bionic Boots разработаны с использованием принципов, найденных в передвижении быстрых наземных животных. С максимальной эффективностью и ловкостью технология буквально помогает выталкивать человека вперед на огромных скоростях. Человек – это самое медленное существо из всех двуногих, но Кэхи не хочет с этим мириться. Конечно, люди умнее всех, но на стометровке страус или кенгуру нас легко обгоняют. И причина этой медленности кроется в ахилловом сухожилии.
Человек – это самое медленное существо из всех двуногих, но Кэхи не хочет с этим мириться. Конечно, люди умнее всех, но на стометровке страус или кенгуру нас легко обгоняют. И причина этой медленности кроется в ахилловом сухожилии.
В основу Bionic Boots было положено искусственно-созданное ахиллово сухожилие самых быстрых двуногих на Земле – страусов. Кэхи с раннего детства был вдохновлён быстротой и ловкостью этих наземных птиц. С их широкой, пружинистой походкой, страусы могут развивать скорость до 70 км/ч.
Ультра лёгкие ботинки имеют инновационную технологию, они сделаны из авиационного алюминия, пружин, и углеродного волокна композитного экзоскелета, не утяжеляя ноги владельца и буквально выталкивая вперед на каждом шаге.
В обычной обуви, большое количество энергии поглощается ступнёй человека, когда она вступает в контакт с землёй. Таким образом, человек теряет из-за ахиллова сухожилия практически всю энергию. И эта энергия уходит в никуда. Bionic Boots исправляют этот факт, путём влияния пружин и упругого механизма, как бы отталкивая ноги от земли. В результате, энергия не только сохраняется, но и добавляется.
В результате, энергия не только сохраняется, но и добавляется.
Для улучшения своего изобретения Кэхи планирует добавить привод, который в сочетании с пружинами позволит человеку работать на скоростях, близких к 45 миль в час и сделает его изобретение бионическим в полном смысле слова.
Обычные люди, не спортсмены, бегающие на таких же скоростях как Усэйн Болт без значительных усилий, – звучит потрясающе! Но Кэхи не удовлетворён – он говорит, что не будет отдыхать пока он не создаст ботинки в которых можно будет опережать некоторых наземных животных на нашей планете.
В публикации использовались материалы odditycentral.com.
Мультимодальный набор данных о походке человека с разной скоростью ходьбы, установленный на взрослых участниках без травм. повседневной деятельности. В клинической практике появление доказательной медицины способствовало развитию инструментов количественной оценки для диагностики и лечения двигательных нарушений, связанных с патологией. В частности, процесс анализа нарушений походки в настоящее время часто состоит из измерения кинематики и кинетики суставов в трех измерениях
1 . Эта оценка называется клиническим анализом походки (CGA) и представляет собой попытку предоставить объективную запись, которая количественно определяет величину отклонений от нормальной походки 2 . На этой основе идентифицируется набор нарушений, связанных с патологией, оказывающих наибольшее влияние на походку, и их можно использовать для целевого лечения 3 .
Эта оценка называется клиническим анализом походки (CGA) и представляет собой попытку предоставить объективную запись, которая количественно определяет величину отклонений от нормальной походки 2 . На этой основе идентифицируется набор нарушений, связанных с патологией, оказывающих наибольшее влияние на походку, и их можно использовать для целевого лечения 3 . Однако выявление отклонений сильно зависит от характеристик используемой нормативной базы данных 4 . Затем требуется особое внимание, чтобы различать различия между патологическими и бессимптомными популяциями, которые могут спутать отклонения. В частности, походку патологических популяций часто наблюдают при самостоятельно выбранной ими скорости ходьбы и сравнивают с нормативными данными, установленными при спонтанной скорости ходьбы бессимптомной популяции 5 . Поскольку скорость спонтанной ходьбы в патологических популяциях ( e , г . колебалась от 0,18 до 1,03 м/с -1 при инсульте 6 ) часто ниже, чем у бессимптомной популяции (от 1,04 до 1,60 м). .с — 1 7 ), появляется несоответствие скорости ходьбы. Поскольку известно, что скорость ходьбы влияет на кинематику, кинетику, пространственно-временные параметры и мышечную активность 8 , идентификация отклонений походки может стать сложной задачей, поскольку им могут способствовать как патология, так и разница в скорости ходьбы 9 . Но скорость ходьбы — не единственная переменная, которая может быть источником несоответствия при сравнении пациента и бессимптомной популяции. Демографические и антропометрические параметры также могут влиять на интерпретацию CGA. Недавно Чехаб и др. . 10 продемонстрировали влияние скорости ходьбы, а также возраста, пола и индекса массы тела (ИМТ) на трехмерную кинематику и кинетику нижней конечности во время ходьбы. В то время как скорость ходьбы была наиболее влиятельной переменной, авторы подчеркнули влияние демографических и антропометрических параметров на очень общие параметры (9).
.с — 1 7 ), появляется несоответствие скорости ходьбы. Поскольку известно, что скорость ходьбы влияет на кинематику, кинетику, пространственно-временные параметры и мышечную активность 8 , идентификация отклонений походки может стать сложной задачей, поскольку им могут способствовать как патология, так и разница в скорости ходьбы 9 . Но скорость ходьбы — не единственная переменная, которая может быть источником несоответствия при сравнении пациента и бессимптомной популяции. Демографические и антропометрические параметры также могут влиять на интерпретацию CGA. Недавно Чехаб и др. . 10 продемонстрировали влияние скорости ходьбы, а также возраста, пола и индекса массы тела (ИМТ) на трехмерную кинематику и кинетику нижней конечности во время ходьбы. В то время как скорость ходьбы была наиболее влиятельной переменной, авторы подчеркнули влияние демографических и антропометрических параметров на очень общие параметры (9). 0017 е . г . наклон таза, пик разгибания бедра) используются при выявлении отклонений походки.
0017 е . г . наклон таза, пик разгибания бедра) используются при выявлении отклонений походки.
Несколько наборов данных были доступны в литературе и могут быть использованы для облегчения создания широкой нормативной базы данных, позволяющей сопоставлять характеристики пациентов 11,12,13,14 . Однако лишь немногие наборы данных включают все общие параметры для большого числа субъектов ( i e пространственно-временные, кинематические, кинетические, электромиографические сигналы). Предлагаемый набор данных был создан на 50 здоровых участниках в возрасте от 19 лет.и 67 лет. Им было предложено пройтись по ровной прямой дорожке с пятью различными скоростями ходьбы: от 0 до 0,4 м/с -1 , от 0,4 до 0,8 м/с -1 , от 0,8 до 1,2 м/с -1 , самостоятельно выбранная спонтанная скорость. скорость и самостоятельно выбранная быстрая скорость. Одновременно регистрировались трехмерные траектории 52 кожных рефлекторных маркеров, распределенных по всему телу, трехмерные силы и момент опорной реакции, а также электромиографические сигналы. Для каждого участника было записано и предварительно обработано 3 испытания для каждого условия скорости ходьбы плюс одно статическое, всего 1143 испытания. Этот набор данных может увеличить размер популяционной выборки аналогичных наборов данных, привести к анализу влияния скорости ходьбы на походку или провести необычный анализ характеристик походки благодаря используемому набору маркеров всего тела.
Для каждого участника было записано и предварительно обработано 3 испытания для каждого условия скорости ходьбы плюс одно статическое, всего 1143 испытания. Этот набор данных может увеличить размер популяционной выборки аналогичных наборов данных, привести к анализу влияния скорости ходьбы на походку или провести необычный анализ характеристик походки благодаря используемому набору маркеров всего тела.
Методы
Участники
Пятьдесят участников (24 женщины и 26 мужчин, 37,0 ± 13,6 лет, 1,74 ± 0,09 м, 71,0 ± 12,3 кг) были набраны на добровольной основе. Исследование было одобрено институциональным комитетом по медицинской этике Rehazenter и соответствует рекомендациям Хельсинкской декларации. Участники дали информированное согласие на участие в исследовании. Все участники были бессимптомными, и . и . здоровы и не имели травм нижних и верхних конечностей за последние шесть месяцев, а также не оперировались ни на нижних, ни на верхних конечностях в течение последних двух лет. Кроме того, в это исследование были включены только участники, у которых разница в длине ног составляла менее 1,5% от роста (что соответствует максимуму 0,03 м), чтобы избежать влияния несоответствия длины ног в наборе данных.
Кроме того, в это исследование были включены только участники, у которых разница в длине ног составляла менее 1,5% от роста (что соответствует максимуму 0,03 м), чтобы избежать влияния несоответствия длины ног в наборе данных.
Процедура
Для каждого участника весь сбор данных был получен за один сеанс, который длился примерно 2 часа. Все сеансы вел один и тот же опытный оператор. Была принята следующая процедура:
- 1.
Калибровка систем : Эта калибровка была выполнена в соответствии с инструкциями, доступными в документации производителя, включая определение инерциальной системы координат, динамическую калибровку камер и обнуление силовых пластин.
- 2.
Знакомство с участником : Оператор представил лабораторию, обозначил необходимость создания базы данных и кратко объяснил проведение сеанса, включая используемый материал.

- 3.
Интервью : Интервью позволило на этом этапе собрать информацию о состоянии здоровья и спортивных привычках участника (дополнительная таблица 1).
- 4.
Подготовка участника : Участнику было предложено переодеться в облегающую одежду или нижнее белье, в том числе снять обувь и носки, поскольку приобретение было босиком, и при необходимости завязать волосы. Оператор также собирал антропометрические и демографические данные участников (Таблица 1, доступная только онлайн). Затем участнику снабдили ЭМГ-электродами и кожными отражающими маркерами (см. раздел 9).0017 Записи
). - 5.
Статическая запись : Участник стоял прямо с вытянутыми нижними и верхними конечностями, ладонями вперед, правая голова с прямыми глазами. Было зафиксировано пять секунд без движения. Запись была проверена оператором. Новая попытка стоя выполнялась, если отсутствовал какой-либо маркер или движения нарушали запись.
- 6.
Испытания ходьбой : Участника попросили пройти вперед и назад по 10-метровой прямой дорожке. Данной инструкцией было «ходить как можно более естественно, смотря вперед». Никаких указаний относительно силовых пластин не было дано, чтобы избежать сознательной адаптации походки. Для каждого состояния регистрировали не менее 3 испытаний. Все испытания были быстро проверены оператором. Регистрировались пять состояний скорости ходьбы: от 0 до 0,4 м.с
 Условия C1, C2 и C3 были вызваны метрономом 15 и соответствуют трем группам, описанным Perry 16 ( i , e . домашние амбулаторные, ограниченные амбулаторные амбулаторные и амбулаторные амбулаторные). Для этих 3 условий было предусмотрено время адаптации к заданной частоте вращения педалей, и было проверено, что скорость первого испытания находится в ожидаемом диапазоне скоростей. C4 и C5 были самостоятельно выбранными состояниями в ответ на инструкции идти соответственно «как обычно» и «быстро, но не бежать».
Условия C1, C2 и C3 были вызваны метрономом 15 и соответствуют трем группам, описанным Perry 16 ( i , e . домашние амбулаторные, ограниченные амбулаторные амбулаторные и амбулаторные амбулаторные). Для этих 3 условий было предусмотрено время адаптации к заданной частоте вращения педалей, и было проверено, что скорость первого испытания находится в ожидаемом диапазоне скоростей. C4 и C5 были самостоятельно выбранными состояниями в ответ на инструкции идти соответственно «как обычно» и «быстро, но не бежать». - 7.
Окончание сеанса : Все маркеры и электроды удалены. Дополнительные разъяснения по поводу рекордов были даны участникам во время показа некоторых видеороликов и 3D-анимаций.
Записи
Для отслеживания трехмерных (3D) траекторий набора из 52 кожных отражающих маркеров использовалась оптоэлектронная система с 10 камерами с частотой 100 Гц (OQUS4, Qualisys, Швеция). Набор маркеров (рис. 1, таблица 1) был определен, чтобы позволить использовать биомеханическую модель, предложенную Дюма и Войтушем 9.0005 17 . Эта модель следует рекомендациям Международного общества биомеханики (ISB) 18,19 для определений совместных систем координат и совместных центров. Размещение маркера было достигнуто путем анатомической пальпации (анатомические ориентиры указаны в Таблице 1) в соответствии с рекомендациями, предоставленными Van Sint Jan 20 , и оставались неизменными во всех испытаниях. Один и тот же опытный физиотерапевт выполнял как анатомическую пальпацию, так и установку маркеров для всех включенных участников. Две силовые пластины с частотой 1500 Гц (OR6-5, AMTI, США) использовались для трехмерной записи силы и момента опорной реакции. Эти силовые пластины были встроены в середину дорожки, по которой проходили во время испытаний по наземной ходьбе. Беспроводная электромиографическая (ЭМГ) система с частотой дискретизации 1500 Гц (Desktop DTS, Noraxon, США) использовалась для регистрации сигналов ЭМГ, собранных 8 датчиками, подключенными к парам поверхностных электродов диаметром 10 мм (Ambu Neroline 720, Амбу, Дания).
Набор маркеров (рис. 1, таблица 1) был определен, чтобы позволить использовать биомеханическую модель, предложенную Дюма и Войтушем 9.0005 17 . Эта модель следует рекомендациям Международного общества биомеханики (ISB) 18,19 для определений совместных систем координат и совместных центров. Размещение маркера было достигнуто путем анатомической пальпации (анатомические ориентиры указаны в Таблице 1) в соответствии с рекомендациями, предоставленными Van Sint Jan 20 , и оставались неизменными во всех испытаниях. Один и тот же опытный физиотерапевт выполнял как анатомическую пальпацию, так и установку маркеров для всех включенных участников. Две силовые пластины с частотой 1500 Гц (OR6-5, AMTI, США) использовались для трехмерной записи силы и момента опорной реакции. Эти силовые пластины были встроены в середину дорожки, по которой проходили во время испытаний по наземной ходьбе. Беспроводная электромиографическая (ЭМГ) система с частотой дискретизации 1500 Гц (Desktop DTS, Noraxon, США) использовалась для регистрации сигналов ЭМГ, собранных 8 датчиками, подключенными к парам поверхностных электродов диаметром 10 мм (Ambu Neroline 720, Амбу, Дания). ). Подготовка кожи, расстояние между электродами и расположение электродов соответствовали рекомендациям проекта поверхностной электромиографии для неинвазивной оценки мышц (SENIAM) 21 . Подготовка кожи заключалась в очистке спиртом, которому, при необходимости, предшествовало бритье. Для каждой мышцы применяли межэлектродное расстояние 20 мм. Сигналы ЭМГ регистрировались на 8 мышцах правой голени: большой ягодичной, средней ягодичной, прямой мышце бедра, медиальной широкой, полусухожильной, медиальной икроножной, камбаловидной и передней большеберцовой. Чтобы уменьшить фоновое шумовое загрязнение из-за артефактов движения, каждый датчик с соответствующими кабелями и электродами удерживался с помощью самоклеящейся обмотки (Coban, 3 M, США). Все эти системы были синхронизированы с использованием программного обеспечения Qualisys Track Manager (QTM 2.8.1065, Qualisys, Швеция).
). Подготовка кожи, расстояние между электродами и расположение электродов соответствовали рекомендациям проекта поверхностной электромиографии для неинвазивной оценки мышц (SENIAM) 21 . Подготовка кожи заключалась в очистке спиртом, которому, при необходимости, предшествовало бритье. Для каждой мышцы применяли межэлектродное расстояние 20 мм. Сигналы ЭМГ регистрировались на 8 мышцах правой голени: большой ягодичной, средней ягодичной, прямой мышце бедра, медиальной широкой, полусухожильной, медиальной икроножной, камбаловидной и передней большеберцовой. Чтобы уменьшить фоновое шумовое загрязнение из-за артефактов движения, каждый датчик с соответствующими кабелями и электродами удерживался с помощью самоклеящейся обмотки (Coban, 3 M, США). Все эти системы были синхронизированы с использованием программного обеспечения Qualisys Track Manager (QTM 2.8.1065, Qualisys, Швеция).
Светоотражающие кожные маркеры, нанесенные участникам путем анатомической пальпации. Для нижних конечностей показаны только левые маркеры (зеленые маркеры), а для верхних конечностей — правые маркеры (красные маркеры). Анатомическое описание и полное название каждого маркера приведены в таблице 1.
Для нижних конечностей показаны только левые маркеры (зеленые маркеры), а для верхних конечностей — правые маркеры (красные маркеры). Анатомическое описание и полное название каждого маркера приведены в таблице 1.
Изображение в полном размере
Таблица 1. Траектории маркеров, сохраненные в файлах c3d.Полноразмерная таблица
Обработка данных
Маркировка траекторий маркеров выполнялась в программном обеспечении Qualisys Tracking Manager (QTM 2.8.1065, Qualisys, Швеция), а все события касания и отрыва стопы определялись вручную одним и тем же опытным оператором . События определялись на основе порога 5 N, применяемого к вертикальной силе реакции земли, или на основе траекторий маркеров, когда силы реакции земли были недоступны. Необработанные траектории маркеров, силы и моменты реакции опоры и сигналы ЭМГ, а также временные события были затем экспортированы в стандартный формат файла c3d (https://www.c3d.org), а затем импортированы и обработаны в Matlab (R2018a, The MathWorks, США) с использованием набора инструментов Biomechanics ToolKit (BTK) 22 . Траектории маркеров (выраженные в миллиметрах) при необходимости интерполировались с использованием реконструкции, основанной на взаимных корреляциях маркеров, полученных в результате анализа основных компонентов 23 . Затем траектории сглаживались с помощью фильтра нижних частот Баттерворта 4-го порядка с частотой среза 6 Гц. Силы и моменты реакции опоры (выраженные в Н и Н·мм соответственно) были сглажены с использованием фильтра нижних частот Баттерворта 2-го порядка с частотой среза 15 Гц. Ниже порога 5 Н, определенного для вертикальной силы реакции земли, все эти силы и моменты были установлены равными нулю. Сигналы ЭМГ (выраженные в вольтах) подвергались полосовой фильтрации между 30 и 300 Гц (4 th заказать фильтр Баттерворта) для уменьшения артефактов, вызванных движением и электромагнитными полями. Все обработанные данные были обрезаны за несколько кадров до первого события и несколько кадров после последнего события, в зависимости от доступных данных.
Траектории маркеров (выраженные в миллиметрах) при необходимости интерполировались с использованием реконструкции, основанной на взаимных корреляциях маркеров, полученных в результате анализа основных компонентов 23 . Затем траектории сглаживались с помощью фильтра нижних частот Баттерворта 4-го порядка с частотой среза 6 Гц. Силы и моменты реакции опоры (выраженные в Н и Н·мм соответственно) были сглажены с использованием фильтра нижних частот Баттерворта 2-го порядка с частотой среза 15 Гц. Ниже порога 5 Н, определенного для вертикальной силы реакции земли, все эти силы и моменты были установлены равными нулю. Сигналы ЭМГ (выраженные в вольтах) подвергались полосовой фильтрации между 30 и 300 Гц (4 th заказать фильтр Баттерворта) для уменьшения артефактов, вызванных движением и электромагнитными полями. Все обработанные данные были обрезаны за несколько кадров до первого события и несколько кадров после последнего события, в зависимости от доступных данных. Наконец, они были сохранены в новом файле c3d с использованием BTK. Эти окончательные файлы c3d представлены в настоящем наборе данных.
Наконец, они были сохранены в новом файле c3d с использованием BTK. Эти окончательные файлы c3d представлены в настоящем наборе данных.
Записи данных
Все записи данных доступны на figshare 24 . Все они хранятся в формате файла c3d (https://www.c3d.org). Этот формат файла является общедоступным двоичным форматом файла, поддерживаемым всеми производителями систем захвата движения и программного обеспечения для биомеханики. Он обычно используется для хранения синхронизированных координат 3D-маркеров и аналоговых данных, а также набора метаданных (9).0017 е
Пробные файлы упоминаются в нашем наборе данных как YYYYNNN_CV_TT.c3d, а статические файлы — как YYYYNNN_ST.c3d, организованные по папке YYYYNNN, с:
ГГГГ: год приобретения, и . г . 2014
NNN: идентификация субъекта (номер прохода по годам), е .
 г . 001
г . 001CV: условие скорости ходьбы, i . и . C1, C2, C3, C4 или C5
TT: пробный номер, и . и . с 01 по 05
Для каждого из 50 участников в наборе данных было доступно как минимум 3 испытания (один цикл правой и один левый ход на испытание) для каждого из 5 состояний плюс одно статическое состояние, всего 1143 испытания. Структура, метки, формат, размерность, единица измерения и описание каждой переменной, хранящейся в файлах c3d, приведены в таблицах 1–4. Информация о доступности данных силовой пластины по каждому испытанию приведена в дополнительной таблице 2.
Таблица 2 Аналоговые данные, хранящиеся в файлах c3d.Полноразмерная таблица
Таблица 3 Данные Forceplate, хранящиеся в файлах c3d.
Полноразмерная таблица
Таблица 4 Метаданные*, хранящиеся в файлах c3d.Полноразмерная таблица
Техническая проверка
Калибровка оптоэлектронной системы
Как подробно описано в процедуре (см. Методы ), оптоэлектронная система калибровалась перед каждым сеансом в соответствии с инструкциями, доступными в документации производителя. Во всех калибровочных файлах невязки ( и . и . среднее значение различных остатков двухмерных маркерных лучей, принадлежащих одной и той же трехмерной точке), были ниже 2 мм, а стандартное отклонение реконструированной длины палочки ( i . e . калибровочный инструмент) оставалось ниже 1,5 мм.
3D-траектории кожных отражающих маркеров
Во всех статических и пробных файлах 3D-траектории кожных отражающих маркеров были полностью реконструированы ( i . e . 0% разрыва в траекториях), а остатки остались ниже 4 мм.
Местоположение центра давления
Точность определения местоположения центра давления специально не оценивалась во время записи этих данных. Однако точность локации центра давления ранее оценивалась по методике Калтестера (Visual 3D v6, C-Motion, США) до 3,11 ± 0,69 мм по оси X, 0,98 ± 0,54 мм по оси Y и 1,55 ± 0,11 мм. по оси Z для силовой пластины 1, 3,56 ± 0,89 мм по оси X, 3,10 ± 0,79 мм по оси Y и 1,70 ± 0,12 по оси Z для силовой пластины 2,
Замечания по использованию
Записи данных, хранящиеся в формате файла c3d (https://www.c3d.org), можно легко прочитать с помощью синтаксических анализаторов c3d, таких как Biomechanics ToolKit (BTK) (http://biomechanical-toolkit.github). .io/) 22 и пакет ezc3d (https://github.com/pyomeca/ezc3d). Кинематический и кинетический анализатор Motion (Mokka) также может быть удобным инструментом для 3D-визуализации (http://biomechanical-toolkit.github.io/mokka/index.html). Антропометрические и демографические параметры каждого участника хранятся в метаданных соответствующих файлов c3d. На основе набора маркеров, использованного в этом исследовании, кинематика и динамика суставов могут быть рассчитаны с использованием набора инструментов 3D-кинематики и обратной динамики, предложенного Дюма и бесплатно доступного на файловом обмене MathWorks (https://nl.mathworks.com/matlabcentral/fileexchange/ 58021-3d-кинематика и обратная динамика).
На основе набора маркеров, использованного в этом исследовании, кинематика и динамика суставов могут быть рассчитаны с использованием набора инструментов 3D-кинематики и обратной динамики, предложенного Дюма и бесплатно доступного на файловом обмене MathWorks (https://nl.mathworks.com/matlabcentral/fileexchange/ 58021-3d-кинематика и обратная динамика).
Доступность кода
Пользовательский код Matlab, используемый для обработки данных (см. предыдущий раздел), находится в свободном доступе в следующем репозитории: https://github.com/fmoissenet/CGA_Rehazenter_Toolbox/tree/article_ScientificData2019. Набор инструментов для биомеханики (BTK) также находится в свободном доступе в следующем репозитории: http://biomechanical-toolkit.github.io/.
Ссылки
Бейкер Р. Методы анализа походки в реабилитации. J. Нейроинженерная реабилитация. 3 , 4 (2006).
Артикул Google Scholar
 «>
«>Арман, С., Муассене, Ф., де Кулон, Г. и Бонфуа-Мазур, А. Выявление и понимание отклонений походки: критический обзор и перспективы. Мов . Спортивная наука . — Наука . Мот . 77–88 (2017).
Moissenet, F. & Armand, S. Качественные и количественные методы оценки нарушений походки. В Ортопедическое лечение детей с детским церебральным параличом . Издательство Nova Science, Нью-Йорк, США (2015).
Schreiber, C., Armand, S. & Moissenet, F. Интерпретация обычных показателей походки связана со скоростью ходьбы нормативных данных. Осанка походки 57 , 217–218 (2017).
Артикул Google Scholar
Пинзон, О., Шварц, М. Х., Томасон, П. и Бейкер, Р. Сравнение нормативных справочных данных из различных служб анализа походки. Осанка походки 40 , 286–290 (2014).
Артикул Google Scholar
 «>
«>Олни, Дж. и П. Гриффин, С. М. и Д. Макбрайд, И. Временные, кинематические и кинетические переменные, связанные со скоростью ходьбы у субъектов с гемиплегией: регрессионный подход. Физ. тер. 74 , 872–85 (1994).
Артикул КАС Google Scholar
Salbach, N.M. и др. . Референтные значения для стандартизированных тестов скорости ходьбы и расстояния: систематический обзор. Осанка походки 41 , 341–360 (2015).
Артикул Google Scholar
Schwartz, M.H., Rozumalski, A. & Trost, J.P. Влияние скорости ходьбы на походку типично развивающихся детей. Дж. Биомех. 41 , 1639–1650 (2008).
Артикул Google Scholar
Стокварт, Г., Детремблёр, К. и Лежен, Т. Влияние скорости на кинематические, кинетические, электромиографические и энергетические эталонные значения во время ходьбы на беговой дорожке.
 Нейрофизиол. клин. Нейрофизиол. 38 , 105–116 (2008).
Нейрофизиол. клин. Нейрофизиол. 38 , 105–116 (2008).Артикул КАС Google Scholar
Chehab, E. F., Andriacchi, T. P. & Favre, J. Скорость, возраст, пол и индекс массы тела обеспечивают надежную основу для сравнения кинематического и кинетического профилей нижних конечностей при ходьбе. Дж. Биомех. 58 , 11–20 (2017).
Артикул КАС Google Scholar
Fukuchi, C.A., Fukuchi, R.K. & Duarte, M. Общедоступный набор данных о кинематике и кинетике ходьбы по земле и на беговой дорожке у здоровых людей. PeerJ 6 , e4640 (2018).
Артикул Google Scholar
Ходжинс, Дж. База данных захвата движения графической лаборатории CMU (2015).
Kirtley, C. Нормативная база данных походки CGA (2014).

Мур, Дж. К., Хнат, С. К. и ван ден Богерт, А. Дж. Подробный набор данных о походке человека и влиянии механических возмущений. PeerJ 3 , e918 (2015).
Артикул Google Scholar
Schreiber, C., Remacle, A., Chantrain, F., Kolanowski, E. & Moissenet, F. Влияние ритмической слуховой стимуляции на бессимптомную походку. Осанка походки 50 , 17–22 (2016).
Артикул Google Scholar
Перри, Дж., Гарретт, М., Гронли, Дж. К. и Малрой, С. Дж. Классификация нарушений ходьбы у пациентов, перенесших инсульт. Инсульт 26 , 982–989 (1995).
Артикул КАС Google Scholar
Дюма Р. и Войтуш Дж. Оценка инерционных параметров сегментов тела для биомеханических моделей твердого тела, используемых в анализе движения.
 В Handbook of Human Motion (под редакцией Müller, B. и др. .) 1–31 (Springer International Publishing, 2017).
В Handbook of Human Motion (под редакцией Müller, B. и др. .) 1–31 (Springer International Publishing, 2017).Ву, Г. и др. . Рекомендация ISB по определениям системы координат различных суставов для сообщения о движении суставов человека — часть I: лодыжка, бедро и позвоночник. Дж. Биомех. 35 , 543–548 (2002).
Артикул Google Scholar
Ву, Г. и др. . Рекомендация ISB по определениям систем координат различных суставов для сообщения о движении суставов человека – Часть II: плечо, локоть, запястье и кисть. Дж. Биомех. 38 , 981–992 (2005).
Артикул КАС Google Scholar
ван Синт Ян, С. Цветной атлас определений ориентиров скелета. Черчилль Ливингстон 1623 (2007).
 «>
«>Hermens, HJ, Freriks, B., Dissselhorst-Klug, C. & Rau, G. Разработка рекомендаций для датчиков SEMG и процедур размещения датчиков. Ж. Электромиогр. Кинезиол 10 , 361–374 (2000).
Артикул КАС Google Scholar
Barre, A. & Armand, S. S. Biomechanical ToolKit: Платформа с открытым исходным кодом для визуализации и обработки биомеханических данных. Вычисл. Методы Программы Биомед. 114 , 80–87 (2014).
Артикул Google Scholar
Глёрсен, Ø. и Федерольф, П. Прогнозирование траекторий отсутствующих маркеров в данных о движении человека с использованием интеркорреляций маркеров. PloS One 11 , e0152616 (2016 г.).
Артикул Google Scholar
Moissenet, F. & Schreiber, C. Мультимодальный набор данных о походке человека с разной скоростью ходьбы, установленный на взрослых участниках без травм.
 figshare , https://doi.org/10.6084/m9.figshare.7734767 (2019).
figshare , https://doi.org/10.6084/m9.figshare.7734767 (2019).
Скачать ссылки
Благодарности
Авторы хотели бы поблагодарить всех добровольцев за их любезное участие, а также Angélique Remacle за время, потраченное на получение этого набора данных.
Информация об авторе
Авторы и организации
Национальный центр функциональной реабилитации и реадаптации – Rehazenter, Laboratoire d’Analyse du Mouvement et de la Posture, Люксембург, Люксембург
Селин Шрайбер и Флоран Муассене
- Селин Шрайбер
Просмотр публикаций автора
Вы также можете искать этого автора в PubMed Google Scholar
- Florent Moissenet
Просмотр публикаций автора
Вы также можете искать этого автора в PubMed Google Scholar
Contributions
CS и FM разработал протокол, используемый для создания представленного набора данных. CS подготовил данные и перепроверил все записи. Ф.М. разработал теорию и провел обработку данных. К.С. и Ф.М. обсудили результаты и внесли свой вклад в окончательный вариант рукописи.
CS подготовил данные и перепроверил все записи. Ф.М. разработал теорию и провел обработку данных. К.С. и Ф.М. обсудили результаты и внесли свой вклад в окончательный вариант рукописи.
Автор, ответственный за переписку
Флоран Муассене.
Заявление об этике
Конкурирующие интересы
Авторы не заявляют об отсутствии конкурирующих интересов.
Дополнительная информация
Примечание издателя: Springer Nature остается нейтральной в отношении юрисдикционных претензий в опубликованных картах и институциональной принадлежности.
Только онлайн Таблица
Только онлайн Таблица 1 Антропометрические и демографические данные участников.Полноразмерная таблица
Файл метаданных ISA-Tab
Загрузить файл метаданных.
Дополнительная информация
Дополнительные материалы.
Права и разрешения
Открытый доступ Эта статья находится под лицензией Creative Commons Attribution 4. 0 International License, которая разрешает использование, совместное использование, адаптацию, распространение и воспроизведение на любом носителе или в любом формате при условии, что вы укажете соответствующую ссылку на первоначальный автор(ы) и источник, предоставьте ссылку на лицензию Creative Commons и укажите, были ли внесены изменения. Изображения или другие сторонние материалы в этой статье включены в лицензию Creative Commons для статьи, если иное не указано в кредитной строке материала. Если материал не включен в лицензию Creative Commons статьи, а ваше предполагаемое использование не разрешено законом или выходит за рамки разрешенного использования, вам необходимо получить разрешение непосредственно от правообладателя. Чтобы просмотреть копию этой лицензии, посетите http://creativecommons.org/licenses/by/4.0/.
0 International License, которая разрешает использование, совместное использование, адаптацию, распространение и воспроизведение на любом носителе или в любом формате при условии, что вы укажете соответствующую ссылку на первоначальный автор(ы) и источник, предоставьте ссылку на лицензию Creative Commons и укажите, были ли внесены изменения. Изображения или другие сторонние материалы в этой статье включены в лицензию Creative Commons для статьи, если иное не указано в кредитной строке материала. Если материал не включен в лицензию Creative Commons статьи, а ваше предполагаемое использование не разрешено законом или выходит за рамки разрешенного использования, вам необходимо получить разрешение непосредственно от правообладателя. Чтобы просмотреть копию этой лицензии, посетите http://creativecommons.org/licenses/by/4.0/.
К файлам метаданных, связанным с этой статьей, относится отказ от права Creative Commons на общественное достояние http://creativecommons.org/publicdomain/zero/1. 0/.
0/.
Перепечатки и разрешения
Об этой статье
Набор биомеханических данных о ходьбе здорового человека с различной скоростью, длиной шага и шириной шага
описаны только для относительно стандартных условий. В повседневной жизни люди могут регулировать переменные походки в зависимости от условий, например, длину шага, чтобы пересечь набор булыжников, или ширину шага, чтобы пройти узкую дорожку. Кроме того, люди используют разную длину и ширину шагов при перемещении по пересеченной местности 9.0005 1 , что может повлиять на расход энергии 2,3,4,5 . Экспериментальные данные о здоровой ходьбе в широком диапазоне условий могут помочь описать, как происходят эти приспособления, и могут дать информацию для скелетно-мышечных и других биомеханических моделей передвижения. Здесь мы представляем набор биомеханических данных о ходьбе здорового человека, охватывающий широкий спектр условий ходьбы. Набор данных содержит биомеханические переменные для 33 комбинаций скорости (0,7–2,0 м·с −1 ), длина шага (0,5–1,1 м) и ширина шага (0–0,4 м) варьировались в пяти типах условий. Он содержит данные о силе реакции опоры и движениях здоровых молодых людей (N = 10, возраст = 23,5 ± 2,5), собранных с использованием инструментальной беговой дорожки с расщепленным ремнем и систем захвата движения соответственно (в течение 60 с за испытание). Большинство испытаний также содержат 3D-положения суставов, силы, углы, крутящие моменты и мощности, полученные в результате анализа обратной динамики нижних конечностей с использованием стандартного программного обеспечения.
Он содержит данные о силе реакции опоры и движениях здоровых молодых людей (N = 10, возраст = 23,5 ± 2,5), собранных с использованием инструментальной беговой дорожки с расщепленным ремнем и систем захвата движения соответственно (в течение 60 с за испытание). Большинство испытаний также содержат 3D-положения суставов, силы, углы, крутящие моменты и мощности, полученные в результате анализа обратной динамики нижних конечностей с использованием стандартного программного обеспечения.
Часть этих данных использовалась в ранее опубликованных исследованиях. К ним относятся исследования перенаправления центра масс тела 6 и работы мягких тканей как в предпочтительных 7 условиях ходьбы, так и в условиях ходьбы с различной длиной шага 8 .
Методы
Участники
Десять здоровых молодых взрослых участников (возраст 23,5 ± 2,5 года, масса тела 73,5 ± 15 кг, рост 1,76 ± 0,11 м, среднее ± стандартное отклонение) были включены в исследование. эксперименты. В таблице 1 представлены антропометрические данные о включенных участниках. Все участники дали свое информированное согласие на участие в эксперименте, что соответствовало всем соответствующим этическим нормам. И информированное согласие, и протокол исследования были одобрены Институциональным наблюдательным советом Мичиганского университета, где проводился эксперимент.
эксперименты. В таблице 1 представлены антропометрические данные о включенных участниках. Все участники дали свое информированное согласие на участие в эксперименте, что соответствовало всем соответствующим этическим нормам. И информированное согласие, и протокол исследования были одобрены Институциональным наблюдательным советом Мичиганского университета, где проводился эксперимент.
Полноразмерная таблица
Экспериментальный протокол
Участники прошлись по беговой дорожке с приборами при 33 различных комбинациях средней скорости ходьбы \(\bar{v}\), длины шага с , частоты шагов f и ширины шага с . Силы опорной реакции и движения регистрировались в течение 60 с установившейся ходьбы для каждой комбинации. Было пять наборов ограничений (см. Таблицу 2), где некоторые параметры походки варьировались экспериментально («Переменные»), а некоторые были фиксированными («Фиксированные») между условиями: Предпочтительная ходьба с различной средней скоростью ходьбы \(\bar{v}\), Ходьба с переменной длиной шага с различной длиной шага s , но с фиксированной частотой шагов f , Ходьба с переменной скоростью с несколькими частотами шагов f , но с фиксированной длиной шага s , Ходьба с фиксированной скоростью с обратно пропорционально изменяющимися комбинациями длины шага s и частоты шагов f , или Ходьба с переменной шириной шага при различной ширине шага w , но фиксированная скорость \(\bar{v}\) и фиксированная частота шага f . Длина шага с и частота шагов f варьировались относительно индивидуальных предпочтительных значений с* и f *, определенных при непринужденной ходьбе с номинальной скоростью ( v* = 1,25 м·с −1 ). Номинальная скорость ходьбы была выбрана на основе предыдущего исследования 9 , предполагающего, что 1,25 м·с −1 приблизительно соответствует предпочтительной скорости ходьбы для взрослых. Скорость ходьбы \(\bar{v}\) и частота шагов f манипулировали, устанавливая скорость ленты беговой дорожки и прося участников ходить в такт звуковому сигналу соответственно. Длина шага с изменялась как через скорость ходьбы, так и через частоту шагов, исходя из их соотношения \(s=\bar{v}/f\). Ширина шага w выбиралась самостоятельно во всех условиях, кроме Ходьба с переменной шириной шага , где ею экспериментально манипулировали, предлагая участникам наступать на лазерные линии, спроецированные на поверхность беговой дорожки с заданной шириной.
Длина шага с и частота шагов f варьировались относительно индивидуальных предпочтительных значений с* и f *, определенных при непринужденной ходьбе с номинальной скоростью ( v* = 1,25 м·с −1 ). Номинальная скорость ходьбы была выбрана на основе предыдущего исследования 9 , предполагающего, что 1,25 м·с −1 приблизительно соответствует предпочтительной скорости ходьбы для взрослых. Скорость ходьбы \(\bar{v}\) и частота шагов f манипулировали, устанавливая скорость ленты беговой дорожки и прося участников ходить в такт звуковому сигналу соответственно. Длина шага с изменялась как через скорость ходьбы, так и через частоту шагов, исходя из их соотношения \(s=\bar{v}/f\). Ширина шага w выбиралась самостоятельно во всех условиях, кроме Ходьба с переменной шириной шага , где ею экспериментально манипулировали, предлагая участникам наступать на лазерные линии, спроецированные на поверхность беговой дорожки с заданной шириной. Участники, как правило, следовали экспериментальным указаниям достаточно хорошо, но несовершенно, поэтому фактические значения длины, частоты и ширины шага должны быть получены из данных.
Участники, как правило, следовали экспериментальным указаниям достаточно хорошо, но несовершенно, поэтому фактические значения длины, частоты и ширины шага должны быть получены из данных.
Полноразмерный стол
Экспериментальные процедуры
Участники были ознакомлены с подмножеством испытаний во время 6-минутного практического занятия, прежде чем приступить к реальному эксперименту. После выполнения статической пробы стоя для справки, участников попросили ходить так, как они предпочитали, при этом скорость ленты беговой дорожки была установлена на 1,25 м·с -1 . Это первое испытание было использовано для определения предпочтительной длины шага участника с* и шаг частоты f * (см. Таблицу 1). Затем участник практиковался с подмножеством испытаний, каждое из которых длилось 30 секунд и вместе охватывало весь экспериментальный диапазон (см. Таблицу 2). Порядок практических испытаний был рандомизирован для каждого участника индивидуально. Далее участник выполнил серию из 33 экспериментальных тестовых проб, каждая по 60 с. Как и в случае с тренировочными испытаниями, участников сначала просили ходить так, как они предпочитали, при этом скорость ленты беговой дорожки составляла 1,25 м·с 9 .0005 −1 . Это первое испытание было использовано для переоценки предпочтительной длины шага участника с * и частоты шага f * (см. Таблицу 1). Предпочтительная ходьба повторялась дважды: один раз в середине сеанса тестирования и один раз в конце. Порядок остальных 30 тестов был рандомизирован для каждого участника индивидуально.
Далее участник выполнил серию из 33 экспериментальных тестовых проб, каждая по 60 с. Как и в случае с тренировочными испытаниями, участников сначала просили ходить так, как они предпочитали, при этом скорость ленты беговой дорожки составляла 1,25 м·с 9 .0005 −1 . Это первое испытание было использовано для переоценки предпочтительной длины шага участника с * и частоты шага f * (см. Таблицу 1). Предпочтительная ходьба повторялась дважды: один раз в середине сеанса тестирования и один раз в конце. Порядок остальных 30 тестов был рандомизирован для каждого участника индивидуально.
Инструменты и сбор данных
Кинематические и кинетические данные были собраны с помощью стандартных лабораторных процедур походки. Силы реакции опоры измерялись на частоте 1200 Гц с помощью двух силовых платформ (Bertec, Колумбус, Огайо, США), расположенных под специальной беговой дорожкой с расщепленным ремнем. Данные захвата движения собирались с частотой 120 Гц с использованием стандартной 3D-системы (Motion Analysis Corporation, Санта-Роза, Калифорния, США) синхронно с записями силовой платформы. Единичные маркеры были расположены на головке 5-й плюсневой кости, пяточной кости, лодыжках, коленных надмыщелках, большом вертлуге, передней верхней подвздошной ости, крестце, акромионе, локтевом надмыщелке и запястье. Кластерные маркеры были прикреплены к голеням и бедрам. Виртуальные маркеры у Хелен Хейс (Дэвис), 9 очков0005 10 были оценены по маркерам таза (см. рис. 1 и таблицу 3). Необработанные силы и движения были сохранены в файлах C3D.
Единичные маркеры были расположены на головке 5-й плюсневой кости, пяточной кости, лодыжках, коленных надмыщелках, большом вертлуге, передней верхней подвздошной ости, крестце, акромионе, локтевом надмыщелке и запястье. Кластерные маркеры были прикреплены к голеням и бедрам. Виртуальные маркеры у Хелен Хейс (Дэвис), 9 очков0005 10 были оценены по маркерам таза (см. рис. 1 и таблицу 3). Необработанные силы и движения были сохранены в файлах C3D.
( A ) Участник с маркерами захвата движения, прикрепленными к конечностям и анатомическим участкам. ( B ) Обратная динамическая модель с предполагаемыми положениями маркеров и смоделированными положениями сегментов, визуализируемая с помощью фигурки скелета. Обратите внимание, что сегменты туловища и рук показаны здесь в иллюстративных целях, но не использовались в анализе обратной динамики из-за неполного набора маркеров верхней части тела.
Полноразмерное изображение
Таблица 3 Расположение маркеров.Полноразмерная таблица
Анализ данных и экспорт в Visual3D
После сохранения в формате C3D собранные силы и движения были отфильтрованы и обработаны с помощью стандартного программного обеспечения обратной динамики (Visual3D, C-Motion, Germantown, MD, USA). Программное обеспечение Visual3D было впервые использовано для фильтрации сил реакции земли и местоположения маркеров с использованием фильтра нижних частот Баттерворта с частотами среза 25 Гц и 6 Гц соответственно, как и в предыдущем исследовании 9.0005 7 . Голеностопный, коленный и тазобедренный суставы определяли на основе расположения лодыжек, надмыщелков и точек Хелен Хейс (Дэвис) соответственно 10 . Углы суставов определяли относительно статического стояния. Смещение силы реакции опоры определялось как среднее за выбранный вручную интервал времени, в течение которого обе ступни не касались земли, и вычиталось из сигнала силы реакции опоры. Затем был проведен анализ обратной динамики обработанных сил реакции опоры и местоположения маркеров нижних конечностей для получения биомеханических переменных, включая трехмерные положения суставов, силы, углы, крутящие моменты и мощности. Отфильтрованные силы, движения и биомеханические переменные были сохранены в файлах CMO. Наконец, данные CMO были экспортированы в файлы MAT для дальнейшего анализа с помощью программного обеспечения MATLAB (MathWorks Inc., Натик, Массачусетс, США), включая выбор пяти шагов хорошего качества (см. рис. 2).
Затем был проведен анализ обратной динамики обработанных сил реакции опоры и местоположения маркеров нижних конечностей для получения биомеханических переменных, включая трехмерные положения суставов, силы, углы, крутящие моменты и мощности. Отфильтрованные силы, движения и биомеханические переменные были сохранены в файлах CMO. Наконец, данные CMO были экспортированы в файлы MAT для дальнейшего анализа с помощью программного обеспечения MATLAB (MathWorks Inc., Натик, Массачусетс, США), включая выбор пяти шагов хорошего качества (см. рис. 2).
Технологическая схема обработки данных. Необработанные данные были обработаны с помощью программного обеспечения Visual 3D и MATLAB для получения файлов данных о 5 шагах. Необходимые файлы для каждого шага показаны курсивом под стрелками. Папки и поля, содержащие данные на каждом этапе процесса, отображаются под рабочим процессом.
Полноразмерное изображение
Записи данных
Полный набор данных доступен на figshare 11 . Хранилище данных содержит три папки, соответствующие трем уровням данных: (1) необработанные данные, включая силы и движения в формате C3D, (2) данные обратной динамики, включая вычисленные биомеханические переменные в формате CMO, (3) экспортированные данные, включая биомеханические переменные в формате MAT (см. рис. 2). Подмножество данных уровня 3 (т. е. данные о 5 шагах, описание см. в тексте ниже) ранее было доступно как часть другой публикации 8 , а также доступен на figshare 12 .
Хранилище данных содержит три папки, соответствующие трем уровням данных: (1) необработанные данные, включая силы и движения в формате C3D, (2) данные обратной динамики, включая вычисленные биомеханические переменные в формате CMO, (3) экспортированные данные, включая биомеханические переменные в формате MAT (см. рис. 2). Подмножество данных уровня 3 (т. е. данные о 5 шагах, описание см. в тексте ниже) ранее было доступно как часть другой публикации 8 , а также доступен на figshare 12 .
Уровень 1: Исходные данные
Исходные силы и местоположения маркеров хранятся в общедоступном формате C3D, который можно открыть и обработать с помощью программного обеспечения обратной динамики, такого как Visual3D. Формат C3D поддерживается всеми основными производителями систем 3D Motion Capture. Силы и местоположения маркеров могут использоваться сами по себе или комбинироваться в анализе обратной динамики для вычисления биомеханических переменных, таких как крутящий момент и мощность сустава. У каждого участника есть один файл C3D для каждого испытания. Например, файл C3D для участника 1 испытания 1 называется p1_trial1.c3d. У всех участников было 33 собранных испытания и, следовательно, 33 файла C3D, за одним исключением из-за отсутствия файла C3D (см. Таблицу 1). В таблице 2 указаны экспериментальные условия и параметры походки для каждого испытания. Например, он показывает, что испытание 1 относится к условию переменной скорости со средней скоростью \(\bar{v}\) = 0,70 м·с −1 и длину шага с = с *.
У каждого участника есть один файл C3D для каждого испытания. Например, файл C3D для участника 1 испытания 1 называется p1_trial1.c3d. У всех участников было 33 собранных испытания и, следовательно, 33 файла C3D, за одним исключением из-за отсутствия файла C3D (см. Таблицу 1). В таблице 2 указаны экспериментальные условия и параметры походки для каждого испытания. Например, он показывает, что испытание 1 относится к условию переменной скорости со средней скоростью \(\bar{v}\) = 0,70 м·с −1 и длину шага с = с *.
Уровень 2: данные обратной динамики
Необработанные данные были импортированы и обработаны с помощью программного обеспечения Visual3D для получения данных обратной динамики, сохраненных в (собственном) формате CMO. Файл CMO представляет собой комбинацию нескольких файлов движения C3D, файла статической калибровки C3D и файла описания биомеханической модели MDH. Файл описания модели может быть изменен пользователем. Наличие нескольких файлов движений C3D в одном файле CMO позволяет одновременно применять одну биомеханическую модель к нескольким испытаниям. У каждого участника есть один файл CMO, содержащий все 33 испытания. Например, файл CMO участника 1 называется p1.cmo. Помимо данных файл CMO содержит значения параметров, которые могут быть установлены пользователем. Данные, значения параметров и описание модели вместе дают переменные обратной динамики, которые могут быть выражены в локальных или глобальных системах координат.
У каждого участника есть один файл CMO, содержащий все 33 испытания. Например, файл CMO участника 1 называется p1.cmo. Помимо данных файл CMO содержит значения параметров, которые могут быть установлены пользователем. Данные, значения параметров и описание модели вместе дают переменные обратной динамики, которые могут быть выражены в локальных или глобальных системах координат.
Уровень 3: экспортированные данные
Переменные обратной динамики были экспортированы в формат MAT, который можно открыть с помощью программного обеспечения MATLAB. Мы экспортировали переменные посредством выполнения скриптов конвейера V3S в Visual3D. Сценарий конвейера V3S представляет собой файл ASCII, который можно редактировать в любой обычной программе обработки текстов или в программе Visual 3D. Он указывает программному обеспечению Visual3D выполнять дополнительные вычисления (например, фильтрацию, преобразование координат) и указывает, какие переменные экспортировать. Наши сценарии конвейера V3S вызывают функцию Export_Data_To_Matfile Visual3D для экспорта данных в формат MAT. В качестве примера мы включили скрипт конвейера V3S (p1export.v3s) в репозиторий программного обеспечения (см. Доступность кода). После экспорта каждого испытания для каждого участника мы объединили испытания в один файл для каждого участника. Например, экспортированные переменные участника 1 хранятся в файле p1_AllStridesData.mat. Каждый файл содержит переменную массива структур размером 1 × 33, называемую «данные», с полями: Платформа, Аналог, Целевые данные, Ориентир, Время, Сила, Kinetic_Kinematic, Link_Model_Based и Участник. Каждое из этих полей соответствует одной или нескольким папкам Visual3D (см. рис. 2). Кроме того, мы определили пять шагов хорошего качества и сохранили их в отдельном файле данных. Например, данные о 5 шагах участника 1 хранятся в файле p1_5StridesData.mat. В большинстве случаев в каждом испытании было много хороших шагов, но в некоторых испытаниях требовался отбор для устранения окклюзии захвата движения и обеспечения того, чтобы шаги влево и вправо приземлялись на разные силовые пластины.
В качестве примера мы включили скрипт конвейера V3S (p1export.v3s) в репозиторий программного обеспечения (см. Доступность кода). После экспорта каждого испытания для каждого участника мы объединили испытания в один файл для каждого участника. Например, экспортированные переменные участника 1 хранятся в файле p1_AllStridesData.mat. Каждый файл содержит переменную массива структур размером 1 × 33, называемую «данные», с полями: Платформа, Аналог, Целевые данные, Ориентир, Время, Сила, Kinetic_Kinematic, Link_Model_Based и Участник. Каждое из этих полей соответствует одной или нескольким папкам Visual3D (см. рис. 2). Кроме того, мы определили пять шагов хорошего качества и сохранили их в отдельном файле данных. Например, данные о 5 шагах участника 1 хранятся в файле p1_5StridesData.mat. В большинстве случаев в каждом испытании было много хороших шагов, но в некоторых испытаниях требовался отбор для устранения окклюзии захвата движения и обеспечения того, чтобы шаги влево и вправо приземлялись на разные силовые пластины.
Техническая проверка
Мы визуализировали, проанализировали, отобрали и сравнили данные в MATLAB и предоставили примеры сценариев, используемых для этих целей (см. Доступность кода). В целом данные были согласованы среди участников, между участниками и по сравнению с существующими наборами данных. В нескольких случаях данные отсутствовали, были непоследовательными или неправдоподобными, и мы решили не выбирать пять шагов хорошего качества. Запуск предоставленного скрипта main.m (см. Доступность кода) приводит к воссозданию файлов данных 5 шагов из экспортированных файлов данных (см. рис. 2).
Выбор пяти шагов хорошего качества
Пять шагов можно выбрать с помощью сценария MATLAB select_5strides.m, который позволяет пользователю выбрать интервал из пяти шагов и визуализировать пять шагов в сравнении со всем испытанием. Сценарий выводит файл MAT с именем 5strides_heelstrikes.mat, содержащий образцы чисел, определяющие интервал в 5 шагов. Этот файл MAT затем используется в другом сценарии, называемом process_5strides. m, для создания файла данных 5 шагов.
m, для создания файла данных 5 шагов.
Анализ и визуализация
Сценарий MATLAB «example_plotting.m» может использоваться для исследования данных о 5 шагах для указанной биомеханической переменной, участника и испытания. Он также создает график 3 × 3 угла, момента и мощности для всех трех суставов (например, голеностопного, коленного, тазобедренного) (см. рис. 3). Скрипт MATLAB «analyse_biomechanics_script.m» вычисляет механическую работу за шаг в каждом суставе и для всего тела. Пользователь может клонировать репозиторий программного обеспечения и изменять эти сценарии в соответствии со своими конкретными потребностями.
Рис. 3 Типичные примерные данные угла сустава, момента и мощности для голеностопного, коленного и тазобедренного суставов. Линии показывают данные о левой ноге (красный) и правой ноге (желтый) репрезентативного участника (1), идущего с номинальной скоростью (1,25 м·с -1 ) с предпочтительной частотой шагов и длиной шага. Положительные (отрицательные) значения угла и момента указывают на растяжение (сгибание).
Положительные (отрицательные) значения угла и момента указывают на растяжение (сгибание).
Полноразмерное изображение
Попытки без пяти шагов хорошего качества
Было несколько случаев, когда мы решили не выбирать пять шагов хорошего качества, включая условия переменной ширины шага для всех испытуемых, все испытания для испытуемого 10 и три отдельные случаи.
Ходьба с переменной шириной шага для всех субъектов
Мы не отбирали данные о 5 шагах для ходьбы с переменной шириной шага (пять испытаний для каждого субъекта). Это условие включало испытания с нулевой или почти нулевой шириной шага, когда испытуемые обычно не наступали каждой ногой на отдельные ленты беговой дорожки. Следовательно, одна из двух силовых пластин измеряет суммарный эффект обеих конечностей при двойной опоре, что делает невозможным определение силы, действующей на каждую конечность. Таким образом, обратная динамика отдельных конечностей не подходит для этих испытаний, а вычисленные биомеханические переменные ненадежны. Мы советуем использовать эти испытания только при применении дополнительных методов для оценки силы на каждой конечности.
Мы советуем использовать эти испытания только при применении дополнительных методов для оценки силы на каждой конечности.
Все испытания для субъекта 10
Мы также не выбирали данные о 5 шагах для субъекта 10, поскольку сравнение биомеханических переменных между субъектами (в рамках испытаний) постоянно выявляло, что этот субъект является исключением. Дальнейшая проверка показала, что смоделированный таз был непропорционально мал, возможно, из-за неправильного размещения маркера. Это могло привести к неточному расположению центра тазобедренного сустава, что привело к физиологически неправдоподобным крутящим моментам и усилиям тазобедренного сустава. Мы рекомендуем определять положение центра тазобедренного сустава с помощью методов, которые не зависят от расположения маркеров таза, например, с помощью методов винтовой оси, основанных на расположении маркеров бедра.
Три отдельных случая
Мы не выбрали данные о 5 шагах для трех дополнительных испытаний (из оставшихся 249).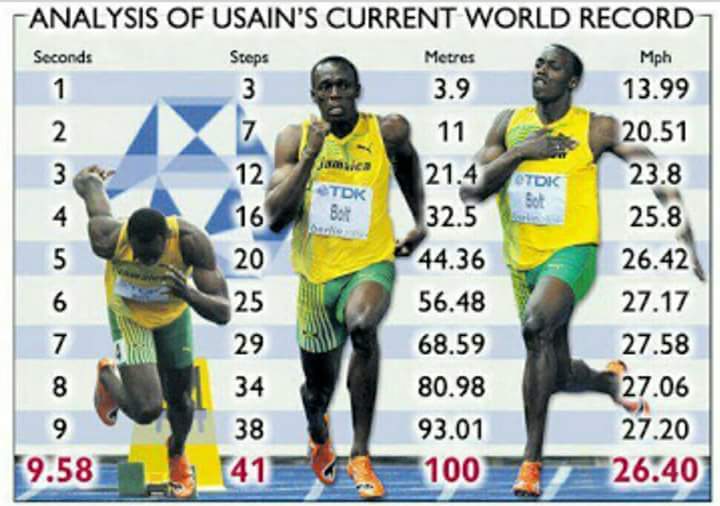 Это были испытания, показавшие большие различия со средним значением для субъекта и с аналогичными испытаниями в рамках одного и того же субъекта. При дальнейшем изучении мы обнаружили проблемы с этими испытаниями и решили исключить их из набора данных 5 шагов. Эти испытания относились к одной из двух категорий проблем (1) ошибка синхронизации и (2) неправильное наступление на силовые плиты. Эти категории более подробно обсуждаются ниже.
Это были испытания, показавшие большие различия со средним значением для субъекта и с аналогичными испытаниями в рамках одного и того же субъекта. При дальнейшем изучении мы обнаружили проблемы с этими испытаниями и решили исключить их из набора данных 5 шагов. Эти испытания относились к одной из двух категорий проблем (1) ошибка синхронизации и (2) неправильное наступление на силовые плиты. Эти категории более подробно обсуждаются ниже.
- 1.
Ошибка синхронизации (два испытания, разные предметы)
Два испытания (у разных субъектов) показали физиологически неправдоподобные совместные способности, которые значительно отличались от аналогичных испытаний у одного и того же субъекта, а также от идентичных испытаний у других субъектов. При ближайшем рассмотрении эти испытания (испытуемый 3, испытание 4 и субъект 9, испытание 14), по-видимому, имели задержку между зарегистрированными движениями и усилиями.
 Это было очевидно из несоответствия между временными рядами центра давления (по зарегистрированным силам) и временными рядами местоположения маркеров лодыжки и пальца ноги (по зарегистрированным движениям), которые тесно связаны в других испытаниях. Поэтому мы решили не выбирать пять темпов для этих испытаний. Мы рекомендуем использовать эти испытания только после правильной синхронизации обоих сигналов, что должно быть выполнено на уровне отдельных файлов C3D.
Это было очевидно из несоответствия между временными рядами центра давления (по зарегистрированным силам) и временными рядами местоположения маркеров лодыжки и пальца ноги (по зарегистрированным движениям), которые тесно связаны в других испытаниях. Поэтому мы решили не выбирать пять темпов для этих испытаний. Мы рекомендуем использовать эти испытания только после правильной синхронизации обоих сигналов, что должно быть выполнено на уровне отдельных файлов C3D. - 2.
Неправильное наступление на силовые пластины (одна попытка)
Как и в испытаниях с переменной шириной шага, один субъект также постоянно наступал на одну из двух силовых платформ в одном из своих других испытаний (испытуемый 4, испытание 1). Поэтому мы решили не выбирать пять шагов для этого испытания. Как и в случае с испытаниями с переменной шириной шага, мы советуем использовать это испытание только при применении дополнительных методов для оценки силы на каждой конечности.

Отсутствующие данные
Было три испытания (из 330) с полностью отсутствующими данными и один субъект с частичными отсутствующими данными из-за ошибок сохранения во время сбора данных. В одном из этих случаев (субъект 7, испытание 24) файл C3D вообще отсутствовал. В другом случае (субъект 6, испытание 31) был файл C3D, но он не включал местоположения маркеров (только силы). В третьем случае (субъект 6, испытание 21) запись данных была остановлена преждевременно, и было зарегистрировано менее пяти шагов. Наконец, испытания субъекта 9не включают положения маркеров верхней части тела акромиона, локтевого надмыщелка и запястья.
Сравнение с другим набором данных
Большинство испытаний показали относительно хорошую согласованность между участниками, что можно проверить, запустив сценарий MATLAB example_plotting.m для различных биомеханических переменных. Например, средний для участников угол лодыжки и лодыжечный момент были разумным представлением данных отдельных участников о предпочтительной ходьбе со скоростью 1,1 м·с –1 (см. левый столбец на рис. 4). Кроме того, эти данные показывают качественное совпадение с ранее опубликованными данными для аналогичных условий. Например, средний угол лодыжки и момент в лодыжке участников для предпочтительной ходьбы со скоростью 1,1 м·с -1 были сопоставимы с таковыми для предпочтительной ходьбы со скоростью 1,0 м·с -1 , как сообщается в другом документе с дескриптором данных (в открытом доступе) 13 (см. Правый столбец на рис. 4). Согласованность между участниками и наборами данных поддерживает достоверность текущего набора данных.
левый столбец на рис. 4). Кроме того, эти данные показывают качественное совпадение с ранее опубликованными данными для аналогичных условий. Например, средний угол лодыжки и момент в лодыжке участников для предпочтительной ходьбы со скоростью 1,1 м·с -1 были сопоставимы с таковыми для предпочтительной ходьбы со скоростью 1,0 м·с -1 , как сообщается в другом документе с дескриптором данных (в открытом доступе) 13 (см. Правый столбец на рис. 4). Согласованность между участниками и наборами данных поддерживает достоверность текущего набора данных.
Репрезентативные данные из текущего набора данных по сравнению с другим набором данных. Левая колонка: данные о пяти шагах лодыжки, во время которых участники шли со скоростью 1,1 м·с -1 с предпочтительной длиной шага (предпочтительные условия ходьбы). Разные цвета представляют разных участников; среднее значение по участникам показано черной линией (в значительной степени закрытой другими линиями). Данные о лодыжках довольно постоянны среди участников. Правый столбец: текущие данные (красная пунктирная линия) и данные из другого опубликованного репозитория 13 (синяя сплошная линия). Настоящие данные качественно согласуются с данными испытания ходьбы с сопоставимой скоростью (1,0 м·с -1 ), полученными из другого набора данных (среднее значение указано сплошной линией, стандартное отклонение указано заштрихованной областью).
Данные о лодыжках довольно постоянны среди участников. Правый столбец: текущие данные (красная пунктирная линия) и данные из другого опубликованного репозитория 13 (синяя сплошная линия). Настоящие данные качественно согласуются с данными испытания ходьбы с сопоставимой скоростью (1,0 м·с -1 ), полученными из другого набора данных (среднее значение указано сплошной линией, стандартное отклонение указано заштрихованной областью).
Изображение полного размера
Ограничения
План эксперимента с повторными измерениями позволяет исследовать влияние скорости ходьбы, частоты шагов, длины и ширины шага на биомеханические переменные, такие как механическая работа, сила и моменты в суставах. Например, в предыдущих исследованиях этот набор данных использовался для изучения того, как биомеханические переменные, такие как скорость центра масс 9,0005 6 и работа с мягкими тканями 7,8 зависят от параметров походки. Хотя размер выборки (N = 10) достаточен для исследования этих конкретных эффектов, он может не подходить для некоторых других приложений. Кроме того, следует отметить, что, поскольку в этом наборе данных используется контролируемая ходьба на беговой дорожке, его применение должно быть ограничено исследовательскими вопросами, касающимися этих приложений. Учет биомеханических различий между беговой дорожкой и ходьбой по земле 14 , а также между устойчивой и неустойчивой ходьбой 15 , набор данных не учитывает изменения самостоятельно выбранной скорости спонтанной ходьбы во время ходьбы по земле 16 .
Кроме того, следует отметить, что, поскольку в этом наборе данных используется контролируемая ходьба на беговой дорожке, его применение должно быть ограничено исследовательскими вопросами, касающимися этих приложений. Учет биомеханических различий между беговой дорожкой и ходьбой по земле 14 , а также между устойчивой и неустойчивой ходьбой 15 , набор данных не учитывает изменения самостоятельно выбранной скорости спонтанной ходьбы во время ходьбы по земле 16 .
Доступность кода
Программное обеспечение доступно на GitHub: github.com/timvanderzee/human-walking-biomechanics.
Литература
Волошина А.С., Куо А.Д., Дейли М.А., Феррис Д.П. Биомеханика и энергетика ходьбы по пересеченной местности. Дж. Экспл. биол. 216 , 3963–3970 (2013).
ПабМед ПабМед Центральный Google Scholar
 «>
«>Соул, Р. Г. и Голдман, Р. Ф. Коэффициенты местности для прогнозирования стоимости энергии. J. Appl. Физиол. 32 , 706–708 (1972).
Артикул КАС пабмед Google Scholar
Пандольф, К.Б., Хейсман, М.Ф. и Гольдман, Р.Ф. Расход метаболической энергии и коэффициенты рельефа при ходьбе по снегу. Эргономика 19 , 683–690 (1976).
Артикул КАС пабмед Google Scholar
Луни, Д. П. и др. . Метаболические затраты на военную перевозку грузов по сложной местности. Мил. Мед. 183 , e357–e362 (2018 г.).
Артикул пабмед Google Scholar
Darici, O. & Kuo, A.D. Люди оптимально предвидят и компенсируют неровный шаг во время ходьбы. eLife 11 , e65402 (2022).

Артикул КАС пабмед ПабМед Центральный Google Scholar
Адамчик П. Г. и Куо А. Д. Перенаправление скорости центра масс при переходе человека от шага к шагу. Дж. Экспл. биол. 212 , 2668–2678 (2009).
Артикул пабмед ПабМед Центральный Google Scholar
Зелик, К. Э. и Куо, А. Д. Ходьба человека — это не только тяжелая работа: свидетельство вклада мягких тканей в рассеивание и возврат энергии. Дж. Экспл. биол. 213 , 4257–4264 (2010).
Артикул пабмед ПабМед Центральный Google Scholar
van der Zee, T.J. & Kuo, A.D. Деформации мягких тканей объясняют большинство вариантов механической работы при ходьбе человека. Дж. Экспл. биол. 224 , jeb239889 (2021).
Артикул пабмед Google Scholar
 «>
«>Ралстон, Х. Дж. Соотношение энергии и скорости и оптимальная скорость при ходьбе по ровной поверхности. Междунар. З. Фюр Ангью. Физиол. Эйншль. Arbeitsphysiologie 17 , 277–283 (1958).
КАС Google Scholar
Дэвис, Р. Б., Ыунпуу, С., Тибурски, Д. и Гейдж, Дж. Р. Метод сбора и обработки данных анализа походки. Гул. Мов. науч. 10 , 575–587 (1991).
Артикул Google Scholar
ван дер Зее, Т.Дж. и Куо, AD. Набор данных биомеханики ходьбы здорового человека с различной скоростью, длиной и шириной шага, figshare , https://doi.org/10.6084/m9.figshare.c.5897423.v1 (2022).
Ван дер Зее, Т.Дж. и Мандингер, Э.М. Набор данных по биомеханике ходьбы здорового человека в различных условиях. figshare https://doi.org/10.6084/m9.figshare.16530939.
 v4 (2021).
v4 (2021).Морейра, Л., Фигейредо, Дж., Фонсека, П., Вилас-Боас, Дж. П. и Сантос, С. П. Данные кинематики, кинетики и ЭМГ нижних конечностей молодых здоровых людей во время ходьбы с контролируемой скоростью. Науч. Данные 8 , 103 (2021).
Артикул пабмед ПабМед Центральный Google Scholar
Семан, М. Б. и др. . Биомеханически ходьба на беговой дорожке сопоставима с ходьбой по земле? Систематический обзор. Осанка походки 92 , 249–257 (2022).
Артикул пабмед Google Scholar
Карлайл, Р. Э. и Куо, А. Д. Люди динамически оптимизируют скорость ходьбы для экономии энергии и времени. Препринт на https://doi.org/10.1101/2022.07.15.500158 (2022 г.).
Охеда, Л. В., Ребула, Дж. Р., Куо, А. Д. и Адамчик, П.
 Г. Влияние контекстных ограничений задачи на предпочтительные параметры шага и их изменчивость во время ходьбы человека. Мед. англ. физ. 37 , 929–936 (2015).
Г. Влияние контекстных ограничений задачи на предпочтительные параметры шага и их изменчивость во время ходьбы человека. Мед. англ. физ. 37 , 929–936 (2015).Артикул пабмед ПабМед Центральный Google Scholar
Скачать ссылки
Благодарности
Авторы хотели бы поблагодарить Карла Зелика и Питера Адамчика за вклад в сбор данных.
Информация об авторе
Авторы и организации
Университет Калгари, Программа для выпускников биомедицинской инженерии, Калгари, Канада
Тим Дж. ван дер Зее и Артур Д. Куо
Университет Калгари, факультет кинезиологии, Калгари, Канада
Тим Дж. ван дер Зее, Эмили М. Мандингер и Артур Д. Куо
900 76
- Tim J. van der Zee
Просмотр публикаций автора
Вы также можете искать этого автора в PubMed Google Scholar
- Emily M.
 Mundinger
MundingerПросмотр публикаций автора
Вы также можете искать этого автора в PubMed Google Академия
- Артур Д. Куо
Просмотр публикаций автора
Вы также можете искать этого автора в PubMed Google Scholar
Contributions
T.J.v.d.Z. участвовал в написании первоначального проекта, окончательной рукописи, анализе данных, визуализации и программном обеспечении. Э.М.М. участвовал в написании окончательной рукописи, анализе данных, визуализации, программном обеспечении и обработке данных. А.Д.К. участвовал в написании окончательной рукописи, методологии, надзоре, управлении проектом и получении финансирования.
Автор, ответственный за переписку
Тим Дж. ван дер Зее.
Заявление об этике
Конкурирующие интересы
Авторы не заявляют об отсутствии конкурирующих интересов.
Дополнительная информация
Примечание издателя Springer Nature остается нейтральной в отношении юрисдикционных претензий в опубликованных картах и институциональной принадлежности.
