Строение ноги человека: фото с описанием и названиями, как называются кости, структура скелета нижних конечностей
Анатомия стопы человека сложна, эта часть ноги, где находится множество мышечных отделов, которые выполняют функции, такие как балансировка, поддержание равновесия, смягчение ударов при шагах, создании надежной опоры, её строение позволяет увидеть, как эволюция приспосабливала наше тело к эффективному способу передвижения – прямохождению. Анатомически она схожа с кистью. У обезьяноподобных предков ее назначение было скорее хватательным.
Костная архитектура
Нижняя часть конечности строится из соединенных в единую структуру костей разного размера. Она позволяет выдерживать вес тела при перемещении, способна выносить огромные нагрузки.
Кости пальцев
Включают в себя четырнадцать фаланг и соединяющие их сочленения. Каждый палец формируется из трех фаланг, кроме большого, он содержит в себя две. Они сообщаются с формирующими плюсну частями скелета через суставной хрящ.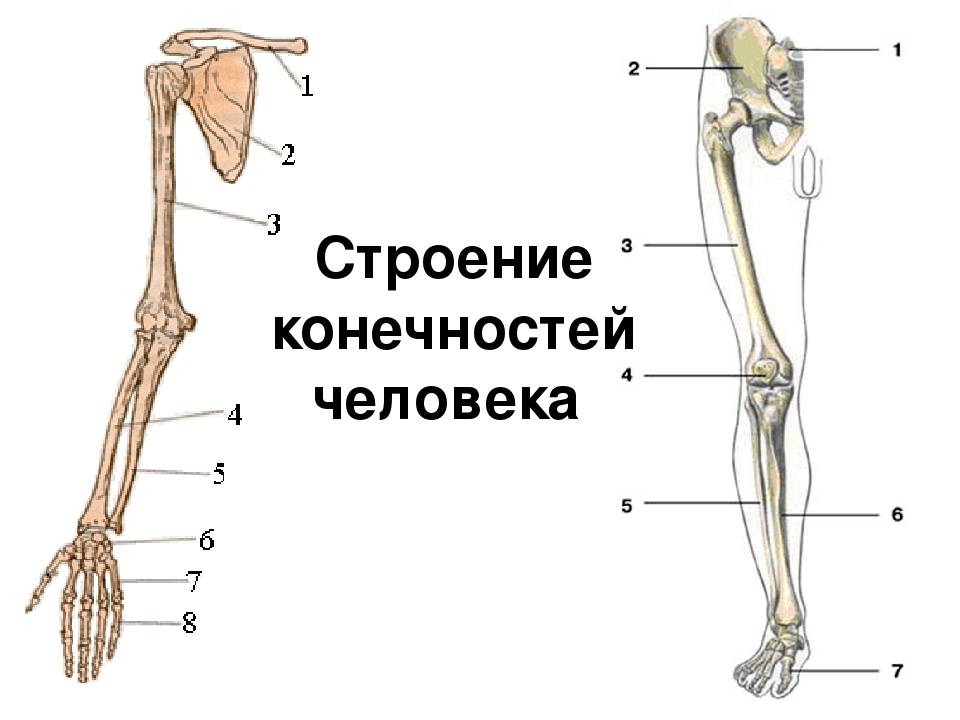 Функция пальцев – равномерное распределение веса тела и улучшение балансировки.
Функция пальцев – равномерное распределение веса тела и улучшение балансировки.
Стопа включает сесамовидные косточки. Это небольшие образования округлой формы, количество индивидуальное, есть люди у которых они отсутствуют. Их опция – увеличивать кривизну поперечного свода.
Плюсна
Ее основывают пять косточек трубчатого типа призматической формы. Первая — мощнейшая, вторая – длиннейшая, последняя, самая короткая, служит адаптацией к повышенной нагрузке.
На фото костей ступни человека видно, что плюсна формирует суставы скелета ноги с обеих сторон. С дистальной — к ней прикрепляются пальцы, с проксимальной – предплюсна. Главная ценность плюсны – поддержание свода, который позволяет эффективно распределить работу по всей его площади.
Предплюсна
Состоит из двух несимметричных частей. Задняя содержит в себе кости:
- Пяточную — крупнейшее костное образование ступни, вытянутой формы, немного сплюснута в боковой проекции.
 Выступающий сзади отросток образует бугор, к нему крепится ахиллово сухожилие.
Выступающий сзади отросток образует бугор, к нему крепится ахиллово сухожилие. - Таранную. Один из важнейших элементов ноги. Выступает в роли распределителя нагрузки между голенью и ступней. Конфигурация сложная, связана с выполняемыми ею функциями. Головная составляющая участвует в формировании голеностопа, тело – передает тяжесть на ближайшие сочленения.
В передний отдел входят:
- Ладьевидная кость. Отличается выпуклостью спереди, соединяется с двумя соседними участками предплюсны. Основная задача – поддержание внутреннего свода.
- Кубовидная. Расположена по наружному краю ступни, частично формирует его. Соединяется с пяточной, клиновидной костями. По нижней поверхности имеет выраженную борозду – в ней проходит связка малоберцовой мышцы.
- Три клиновидные. Они являются составной частью передней поверхности предплюсны.
Суставы и хрящи
Схема анатомического строения стопы человека включает в себя соединения, которые находятся в местах контакта костных поверхностей ноги.
В нижних отделах конечностей располагается множество важных соединений, которые играют ключевую значимость в формировании движения и поддержке равновесия человеческого тела.
Голеностоп
Образуется костями голени (малой и большой берцовыми) и таранной. Их нижние отделы — лодыжки охватывают таранную и формируют «вилку». Она позволяет ступне сгибаться и разгибаться, диапазон хода достигает 90 градусов в обе стороны. Представляет очень прочное соединение, которое укреплено комплексом мощных связок.
По статистике голеностоп наиболее подвержен риску травм. Это связано с большими нагрузками на него, довольно ограниченным диапазоном движения. Отличается высокой тяжестью повреждений, переломы лодыжек нередко бывают комбинированными, со смещением отломков и образованием осколков.
Из-за анатомической особенности, поврежденное голеностопное сочленение долго восстанавливается. Даже после не осложненных травм полная реабилитация может занять несколько лет.
Строение межпредплюсневых суставов человеческой стопы
Их сочетание создает из предплюсны цельную структуру, она отличается низкой подвижностью, высокой прочностью по всем осям воздействия нагрузки.
Подтаранный
Соединение цилиндрической формы, находится в заднем отделе пяточной и таранной кости. Отличается тонкой капсулой и небольшими, короткими очень прочными связками.
Клиноладьевидный
Имеет сложную структуру, в движениях не участвует, обеспечивает дополнительный запас прочности. Упрочнен тыльными подошвенными сухожилиями.
Пяточно-кубовидный
Предназначен для вращения, формой походит на седло. Дополнительно укреплен подошвенными связками.
Таранно-пяточно-ладьевидный сустав
Шаровидное сочленение, его вращение сопряжено с подтаранным соединением, вместе они обеспечивают пронацию и супинацию. Диапазон подвижности – около 55 град. Дополнительно укреплен таранным сухожилием.
Диапазон подвижности – около 55 град. Дополнительно укреплен таранным сухожилием.
Предплюсне-плюсневые
Соединение плюсны и предплюсны, относится к классу синдесмозов, движение в них практически отсутствует. За счет этого отличаются повышенной прочностью. Первое сочленение имеет седловидную форму, два других – уплощенную. Дополнительно фиксируется связками подошвы, плюсневыми и тыльными.
Межплюсневый
Небольшие синдесмозы, укрепляющие структуру предплюсны, важной роли не играют.
Плюснефаланговые
Шарообразные соединения, отличаются достаточно высокой подвижностью, отвечают за движение пальцев ноги. Имеют широкий диапазон вращения, как и все шаровидные шарниры. Из-за особенностей строения и питания эти сочленения часто поражает подагра – отложение солей в капсуле сустава и хряще.Межфаланговые соединения
Располагаются между фалангами пальцев, принимают небольшое участие в их подвижности. У большинства людей малоподвижны. В отдельных случаях могут приобретать значительную гибкость.
Обычно это связано с потерей верхних конечностей, которые инвалид может заменить нижними. После специальных тренировок гибкость и контроль за ходом пальцев значительно прогрессируют.
Настолько, что появляется возможность управлять автомобилем, держать ручку и писать, нога становится практически полной заменой утраченных рук.
Свод стопы
Образуется за счет дугообразного изгиба костей и связочного аппарата. Различают продольный и поперечный, это составляющие единой, мощной системы амортизации. Он принимает на себя большую долю нагрузки при беге, прыжках.
При уплощении свода (плоскостопие) либо его излишней изогнутости наблюдаются проблемы со всем опорно-двигательным аппаратом. Искривляется позвоночник, появляются заболевания коленных, тазобедренных суставов, так проявляются попытки организма компенсировать отсутствие правильной амортизации.
Строение мышечный ткани человеческой ступни
Обеспечивают разнообразие движения конечности. Делятся на две основные группы:
Делятся на две основные группы:
- Мышцы тыльной стороны отвечают разгибание пальцев и стопы.
- Мышцы подошвенной стороны осуществляют их сгибание.
Играют важную роль в формировании правильного свода, принимают на себя огромную нагрузку при передвижении и прыжках.
Сухожилия
Большая их часть являются продолжением мышц, служат для их прикрепления к надкостнице. Еще одна функция – упрочение суставной капсулы и обеспечение подвижности конечностей. Помимо этого, выполняют несколько специфических задач – поддержание свода, правильное распределение и компенсация веса, приходящегося на ноги.
Важную значение играет самая крупная связка организма – ахиллово сухожилие. Она крепится к пяточной кости и выполняет роль аккумулятора механической энергии при ходьбе. За этот счет на 20–30% снижаются энергетические затраты на перемещение.
Повреждение такого сухожилия – очень тяжелая травма, самостоятельно она практически не восстанавливается, поэтому почти все повреждения лечатся только хирургическим путем.
Кровоснабжение
Осуществляется через несколько крупных артерий, начинающихся от колена. Всего их три – верхняя ягодичная, тыльная и задняя большеберцовая. Спускаясь вниз, они ветвятся на все более мелкие сосуды.
Обратно кровь возвращается по глубоким и поверхностным венам. Гравитация препятствует возвратному току крови по венам. По этой причине на ногах чаще всего развивается варикозное расширение поверхностных вен.
Глубокие — болезни не подвержены.
Эта патология возникает при застое крови, венозная стенка набухает, воспаляется и образует болезненные узлы, заполненные вначале жидкой кровью, затем тромбами.
Так заболевание переходит на следующую стадию – тромбофлебит. Закупоренные вены перестают отводить кровь от нижних конечностей.
В результате они отекают, возникает болезненность и локальные нарушения питания тканей, вплоть до появления трофических язв.
Причина недуга – генетическая предрасположенность в комбинации с неблагоприятными факторами (длительная статическая работа).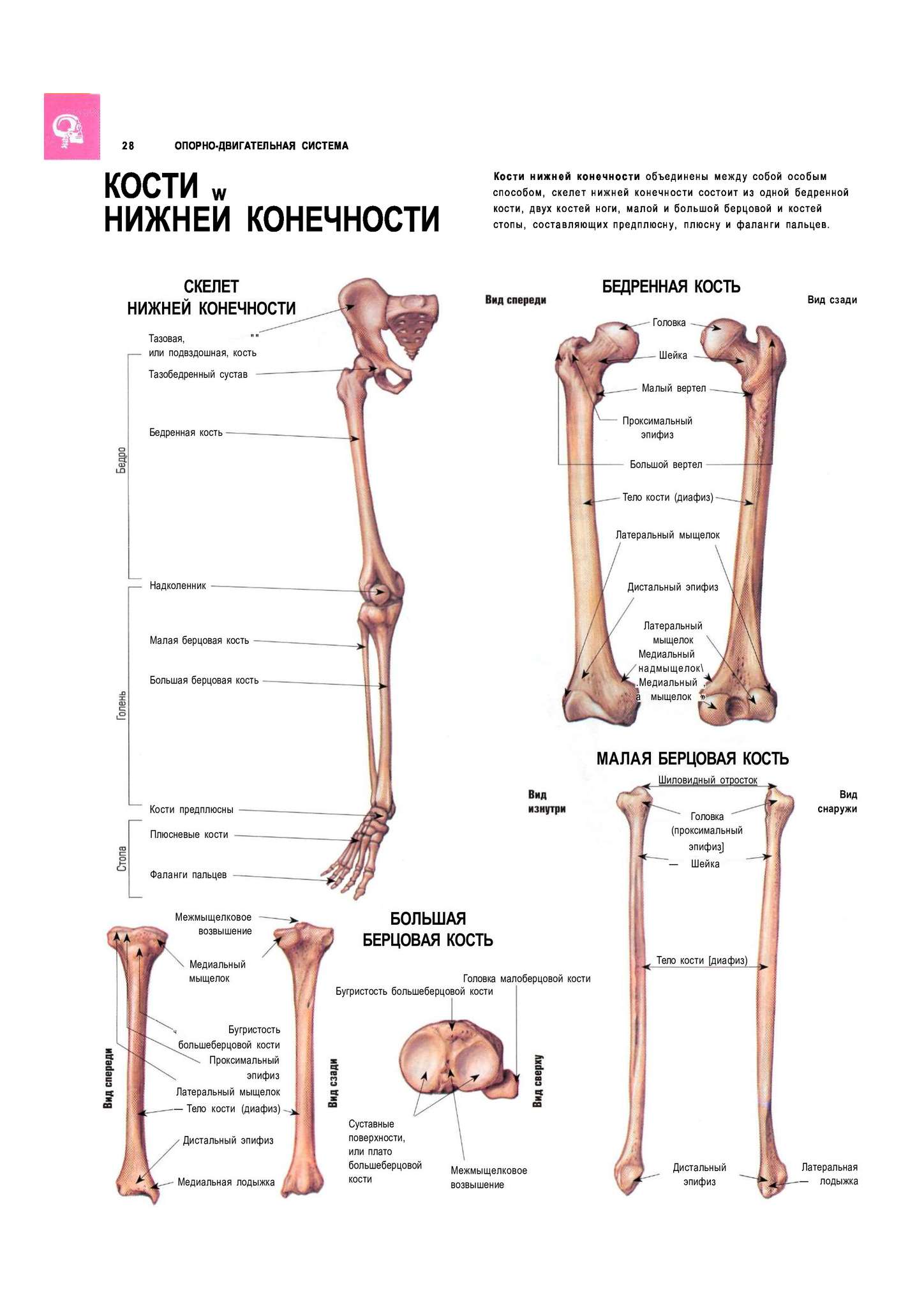
Иннервация
Эту часть тела иннервируют четыре крупных нерва – икроножный, большеберцовый, поверхностный малоберцовый и задний. Они обеспечивают передачу импульсов от мозга к мышцам нижней конечности. Одновременно сигналы идут от нервных окончаний в мозг, так создается температурная, болевая и другие виды чувствительности.Описание заболеваний, нарушающих структуру стопы человека
Нижняя конечность – один из самых нагруженных участков тела. Несмотря на огромный запас прочности повреждения и болезни ступни и голеностопа далеко не редкость.
Артроз
Это поражение сочленений возникает в результате нарушения питания и разрушения хряща. Хрящевая оболочка нарушается и костные поверхности начинают контактировать друг с другом напрямую. Возникает у людей всех возрастов, нередко имеет аутоиммунную природу, проявляясь даже у детей.
Хрящ поражается из-за сбоя в работе иммунной системы, которая начинает атаковать собственный организм.
Главные причины:
- Инфекционные заболевания, вызванные бактериями – дифтерия, бета-гемолитический стрептококк, туберкулез, сифилис.
- Травмы.
- Аутоиммунные болезни, чаще всего красная волчанка, ревматизм, склеродермия.
- Аллергия.
Основные симптомы – отек, боль в области сочленения при движении и в покое, сопровождающийся болезненностью хруст.
На ранних стадиях для лечения применяют противовоспалительные препараты и гормоны. Болезнь склонна к переходу в хроническую форму. В этом случае хорошие результаты дает физиотерапия в комбинации с курортным лечением. При дальнейшем развитии патологии – операция по эндопротезированию. Пораженный сустав замещают на искусственный, который необходимо менять каждые 10–15 лет.
Плоскостопие
Это уплощение свода, одна из частых патологий нижних конечностей, бывает врожденным и приобретенным, классифицируются на поперечное, продольное либо комбинированное. Факторы возникновения:
Факторы возникновения:
- Врожденные аномалии развития связочного аппарата.
- Лишний вес.
- Высокие нагрузки и травмы.
- Нарушения иннервации.
- Неправильно подобранная обувь.
Терапия заключается в устранении причины, приведшей к плоскостопию и восстановлении свода за счет специальных упражнений и ортопедических стелек для обуви. При неэффективности выполняется хирургическая пластика.
Артрит
Имеет аутоиммунную природу. Источники возникновения те же что при артрозе. Характеристика отличается выраженными воспалительными явлениями и поражением вначале крупных соединений (коленных, локтевых, тазобедренных). Затем в процесс вовлекаются все более мелкие суставы вплоть до межфаланговых. Характерно хроническое, многолетнее развитие заболевание с регулярными обострениями и улучшениями состояния. Суставные сумки и хрящи постепенно деградируют заменяются рубцовыми тканями. Теряется подвижность, присуще сильные боли в пораженных участках.
Симптомы:
- Боль и отек.
- Покраснение, повышение температуры тела и кожи над сочленением.
- Сыпь, общее недомогание.
Лечение медикаментозное, при помощи противовоспалительных препаратов и гормонов устраняется воспаление, затем причина возникновения артрита. При неэффективности лекарственной терапии выход только один – эндопротезирование.
Косолапость
Косолапость – нарушение походки, сопровождается искривлением позвоночника, другими проявлениями неправильного распределения веса тела в нижних конечностях.
Чаще всего причина косолапости – врожденный вывих голеностопного сочленения. Бывает приобретенная, она возникает после травм ног, парезов и параличей.
Симптомы:
- Наружный край ступни опускается при подъеме внутреннего.
- Стопы направлены друг на друга тыльными сторонами.
- Пальцы отклоняются внутрь.
Врожденную косолапость можно вылечить – положение ноги выправляется, на нее накладывается специальная шина.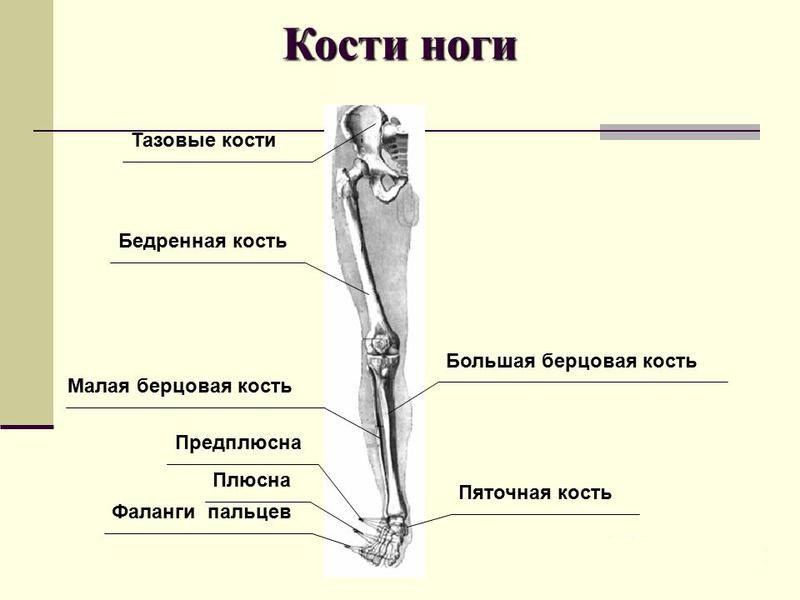 Постепенно сустав приходит в норму за счет гибкости детского скелета.
Постепенно сустав приходит в норму за счет гибкости детского скелета.
В центре протезирования «Хочу Ходить» мы предлагаем индивидуальное изготовление туторов, бандажей и ортоаппаратов, которые часто используются при лечении патологий опорно-двигательного аппарата для фиксации и коррекции сегмента или части тела пациента.
Тяжелая форма врожденной и приобретенная косолапость лечатся только хирургическим путем – осуществляется пластическая операция.
Профилактика болезней
Предупреждение заболеваний нижних конечностей заключается в:
- Регулярном выполнении укрепляющих упражнений. Они увеличивают прочность соединительно-тканных структур, позволяют им переносить большие нагрузки.
- Занятии спортом без экстремальных физических перегрузок – плавание, лыжи, езда на велосипеде. Улучшают кровоток в ногах, предотвращают развитие варикозного расширения вен и артрита.
- Подборе удобной обуви, применение ортопедических стелек. Профилактика плоскостопия и других деформаций стопы.

Хождении босиком по траве, гальке, песку. Мягкий массаж подошвы, которая содержит множество нервных окончаний обеспечивает стимуляцию всего организма.
Предупреждение появления болезни гораздо лучше терапии. А хорошо зная строение ступни и анатомию ноги человека, создать оптимальный план профилактики ее заболеваний будет намного проще.
Источник: https://hochuhodit.ru/articles/stopa-cheloveka-anatomiya-skhema-stroeniya-opisaniya-i-funktsii-otdelov-stupni-s-foto/
Строение ноги человека ниже колена: схемы и описания +Фото
Голеностопный сустав по сути своей служит опорой костного скелета всей нижней конечности. Это место несет нагрузку при движении человека, в отличие от стопы ноги, которая удерживает весь вес. Нога — парный орган движения и опоры человека.
Начало опорно-двигательная система берет в верхней части бедра и заканчивается в нижней части стопы.
Анатомическое строение ноги человека
Функции
У ноги много функций:
- ходьба;
- бег;
- прыжки;
- ползание;
- плавание;
- опора и т.
 д.
д.
Части
Если вспомнить анатомию, то нога имеет три части — бедро, голень, стопа.
Бедро
Выполняет защитную функцию. Состоит из бедренной кости, надколенника, а сверху покрыто мышцами квадрицепсами, двухглавой мышцей бедра и сгибателями.
Голень
Она имеет достаточно простое строение и состоит из двух костей разной длины, имеющих название — малоберцовая и большеберцовая.
Последняя соединяет голень и бедренную кость в месте коленного сустава и по размеру является второй в ноге человека.
Стопа
Образована из множества мелких костей. Ступня или подошва — место соприкосновения с поверхностью земли. А противоположная сторона имеет название — тыльная.
Ступня делится на 3 отдела:
- передний, состоящий из пальцев и подушечек стопы;
- средний — свод стопы. Понятие свод включает в себя ту часть стопы, где она не достает до земли;
- задний — пятка.
Ступня намного сложнее по структуре и имеет более 26 костей и 33 сустава. Строение ступни и кисти очень похожи, различаются лишь степенью переносимой нагрузки. Мышцы и кости ступни в разы сильнее, но зато не могут похвастаться подвижностью кисти руки.
Строение ступни и кисти очень похожи, различаются лишь степенью переносимой нагрузки. Мышцы и кости ступни в разы сильнее, но зато не могут похвастаться подвижностью кисти руки.
Области ноги
Нога состоит из следующих областей:
- передняя + задняя области бедра;
- передняя + задняя области колена;
- передняя + задняя области голени;
- передняя + задняя, наружная + внутренняя части голеностопного сустава;
- тыльная сторона стопы;
- подошва.
Голеностоп
Самая крупная кость — таранная. Вверху находится блок с выступом, соединенный большеберцовой и малоберцовой костями.
Сбоку имеются выросты из кости, именуемые лодыжками. На каждой поверхности сустава находится гиалиновый хрящ, выполняющий амортизирующую и питательную функции.
Само сочленение по строению — сложное, так как состоит из более чем двух костей. Форму имеет блоковидную.
Связки
Связки голеностопного сустава выполняют огромную роль. Именно они ограничивают движение в суставе, защищают его, удерживают костные структуры друг с другом.
Именно они ограничивают движение в суставе, защищают его, удерживают костные структуры друг с другом.
Вообще существует три группы:
- выполняет соединительную функцию между костями голени. К ней относятся следующие связки:
— нижняя, препятствующая внутреннему развороту кости;
— нижняя передняя малоберцовая, не дающая стопе развернутся на внешнюю сторону;
— межкостная;— поперечная, фиксирующая стопу.
- дельтовидная связка, представляющая внешние боковые малоберцовые волокна, которые укрепляют внешний край. Это:
— пяточная;
— передняя таранная;— задняя таранная.
- предотвращающая кости от смещения. Эта группа берет начало на внутренней лодыжке и состоит из:
— большеберцовой пяточной связки;
— большеберцовой ладьевидной;
— таранной передней;— таранной задней.
Мышцы голени
Голень состоит из 20 мышц, отвечающих за подъем, опускание, движение ноги и пальцев. Большое количество мышц начинается в задней части колена и имеет окончание в районе ступни. Именно они приводят ногу в движение. У каждой мышцы свое предназначение и функция.
Большое количество мышц начинается в задней части колена и имеет окончание в районе ступни. Именно они приводят ногу в движение. У каждой мышцы свое предназначение и функция.
У голени три группы мышц:
- передняя, отвечающая за разгибание стоп и пальцев;
- наружная, приводящая в движение наружный край стопы;
- задняя, позволяющая двигать стопой и пальцами.
Самая сильная мышца — икроножная. Ее начало находится у пяточной кости стопы, на которой она держится пяточным сухожилием.
Икры состоят из двух мышц — икроножной и камбаловидной. Икроножная представляет собой большую мышцу с выпуклостями, образованную из двух частей, которые составляют форму ромба. Вторая, камбаловидная совершенно плоская и скрывается икроножной.
При ходьбе, беге или другом движении ногами, икроножная мышца подтягивает пятку, что и заставляет ноги идти.
Важной частью является ахиллесово сухожилие, дающее начало сразу трем мышцам — икроножной, подошвенной и камбаловидной.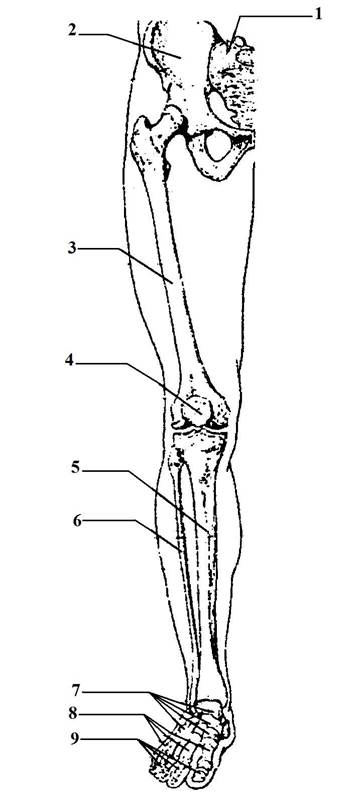 Именно благодаря этому сухожилию человек может бегать, прыгать, ходить и двигаться. Часто именно эта часть подвержена растяжению и разрыву.
Именно благодаря этому сухожилию человек может бегать, прыгать, ходить и двигаться. Часто именно эта часть подвержена растяжению и разрыву.
Функциональность
Голень устроена так, чтобы обеспечить необходимую подвижность при ходьбе. Мышцы сустава работают слажено и совершают разгибание, сгибание, вращение голеностопа, а также создают амортизацию.
Кровоснабжение
- Место соединения большеберцовой и малоберцовой кости находится ниже коленного сустава.
- Питается голень через большеберцовые артерии — заднюю и переднюю, начинающиеся под коленом.
- Артерии разветвляются и обхватывают сустав со всех сторон.
Рядом с артериями проходят вены. Кровь циркулирует по внутренней и внешней сетям, формируя большеберцовые и подкожные вены.
Диагностика заболеваний
Голеностопный сустав может быть поврежден или иметь дефект. Чтобы выявить проблему, назначают диагностическую процедуру. Она может состоять из:
- УЗИ.
 Данный способ диагностики применяется редко, из-за небольшого размера голеностопного сустава. Но, позволяет обнаружить инородное тело, отек, вследствие скопления крови в суставной сумке и просмотреть связки.
Данный способ диагностики применяется редко, из-за небольшого размера голеностопного сустава. Но, позволяет обнаружить инородное тело, отек, вследствие скопления крови в суставной сумке и просмотреть связки. - Артроскопия. Малоинвазивный способ, проводящий диагностику при помощи введения в капсулу видеокамеры.
- Рентген. Самый экономичный способ. Допускается выполнение снимков в разных проекциях. Способен определить опухоль, перелом, вывих и другие процессы.
- МРТ. Лучший вид диагностики для состояния ахиллова сухожилия, связок, хрящей. Дорого, но очень эффективно.
- Компьютерная томография. Поможет оценить состояние сустава. Считается наиболее верным исследованием при артрозе, новообразованиях и переломах.
Патологии
К сожалению, голеностоп может быть травмирован или подвержен развитию заболеваний.
Частыми проблемами являются:
- Остеоартроз, возникающий на фоне дефицита кальция, травматизации, сильной нагрузки на хрящи и кости.
 Из-за этого на костях со временем появляются выросты, называемые остеофитами и несущие проблемы с подвижностью. Появляются боли, скованности, как правило, нет, но постепенно подвижность голеностопа теряется. Лечение проводится медикаментозное в сочетании с физиопроцедурами и упражнениями. Но, если деформация очень серьезная, тогда понадобится хирургическое вмешательство.
Из-за этого на костях со временем появляются выросты, называемые остеофитами и несущие проблемы с подвижностью. Появляются боли, скованности, как правило, нет, но постепенно подвижность голеностопа теряется. Лечение проводится медикаментозное в сочетании с физиопроцедурами и упражнениями. Но, если деформация очень серьезная, тогда понадобится хирургическое вмешательство. - Артрит, вызывающий воспалительный процесс. Может быть при ревматоидном артрите, подагре, попадании в полость инфекции. Характеризуется болевыми ощущениями с самого утра и до ночи. Если двигаться, то боль менее ощутима. В борьбе с симптомами помогут Диклофенак, Найз, Ибупрофен, мази и гели. Обращаться за лечением необходимо к врачу ревматологу, который сможет определить инфекционный артрит, опасный гнойным поражением сустава. При таком диагнозе больной госпитализируется в лечебное учреждение.
- Травмы. Могут быть повреждены сухожилия, кости, связки. Признаки одни — отек, боль, неподвижность и невозможность наступить на ногу.
 Первой помощью является приложение льда к месту поражения, покой и посещение врача.
Первой помощью является приложение льда к месту поражения, покой и посещение врача. - Разрыв сухожилий. Случается при падении, спортивных перегрузках. Стопа при этом не может разогнуться и не возможно поставить ногу на носки. Появляется отек из-за скопившейся крови, а каждое движение доставляет боль. При такой патологии понадобится хирургическое вмешательство.
Важно понимать, что нервная система оказывает прямое влияние на управление мышцами. И если они находятся в покое, то со временем начинают атрофироваться.
Но, если суставы постоянно работают, то тоже плохо — наступает их переутомление. Однако после отдыха работоспособность полностью восстанавливается. Поэтому по рекомендациям врачей тяжелая физическая работа должна иметь в обязательном порядке перерывы.
Источник: https://artritsystavov.ru/artroz/golenostopnogo-sustava/stroenie-nogi-cheloveka-nizhe-kolena.html
Как устроена нога человека
Тело человека менялось в процессе эволюции, исходя из его потребностей. Необходимость передвигаться вертикально значительно повлияла на формирование нашего скелета. Ноги обеспечивают телу полноценную опору и позволяют передвигаться без помощи рук.
Необходимость передвигаться вертикально значительно повлияла на формирование нашего скелета. Ноги обеспечивают телу полноценную опору и позволяют передвигаться без помощи рук.
Из этой статьи вы узнаете анатомическое строение и названия частей ноги. Мы опишем состав и устройство отделов нижней конечности и расскажем, какие мышцы, суставы и связки помогают нам в процессе движения.
Кости нижних конечностей
Каркас ног человека включает тазовый пояс и структуру скелета свободных нижних конечностей. Ногу формирует 30 костей: 26 из них составляют стопу, две образуют голень, одна – скелет бедра. Оставшаяся кость — надколенник, который прикрывает коленный сустав.
Ноги от тазобедренного сустава до кончиков пальцев подразделяются на три отдела:
Чтобы проще было представить, о чем пойдет речь, обратите внимание на строение ноги человека и фото с описанием.
Бедро
Бедро формирует одна кость. Ее длина составляет четверть от роста человека. Строение бедренной кости напоминает трубку с двумя расширенными концами. Средняя часть этой костной трубки – диафиз, а расширенные округлые концы – эпифизы.
Строение бедренной кости напоминает трубку с двумя расширенными концами. Средняя часть этой костной трубки – диафиз, а расширенные округлые концы – эпифизы.
Внутри диафиза находится полость – костный канал.
Эпифизы имеют губчатое строение. Они напоминают пемзу. Верхний эпифиз – головка бедра – почти идеальной округлой формы. Он соединяется с диафизом под углом.
Важно. Шейка бедра (отрезок между диафизом и головкой бедра) – известное слабое место. Этот участок наиболее уязвим, особенно у пожилых людей.
Голень
Каркас голени состоит из большеберцовой и малоберцовой костей. Малоберцовая — тонкая и находится снаружи, а крепкая большеберцовая кость – внутри. Обе имеют трубчатое строение.
Верхний конец большеберцовой кости формирует нижнюю поверхность коленного сустава. Он раздвоен и образует подобие двух «блюдец», в которые ложатся два мыщелка (выступа) бедренной кости. Ниже колена находится еще один сустав – соединение головки малоберцовой кости с большеберцовой.
Он раздвоен и образует подобие двух «блюдец», в которые ложатся два мыщелка (выступа) бедренной кости. Ниже колена находится еще один сустав – соединение головки малоберцовой кости с большеберцовой.
В нем возможен небольшой объем движений, который позволяет свободнее разворачивать ноги наружу и внутрь. Нижним концом большеберцовая кость встроена в голеностопный сустав. На ее нижнем эпифизе есть костная «сосулька» – лодыжка. Этот вырост формирует боковую поверхность голеностопа, часть ноги над стопой.
Малоберцовая косточка напоминает тонкий трехгранный стержень. Она слегка скручена вокруг вертикальной оси. Нижний ее конец образует длинный вырост – наружную лодыжку. Верхний конец соединяется с большеберцовой костью в области ее верхнего диафиза.
Справка. Хотелось бы еще раз подчеркнуть, что такое лодыжки. Отростки малоберцовой и большеберцовой костей — это и есть медиальная и латеральная лодыжки, хотя многие об этом не знают и считают, что это отдельные кости.
Стопа и ее строение
Стопа человека удерживает туловище в пространстве и обеспечивает его передвижение. В процессе эволюции анатомия стопы сильно изменилась. Современное ее строение позволяет человеку передвигаться вертикально. Всего в стопе человека 26 костей различной величины — их объединяют суставы и связки. Разделить их можно на три группы: предплюсна, плюсна и фаланги пальцев.
В отделе предплюсны расположено семь костей. Крупными из них считаются таранная и пяточная, другие — мелкие (ладьевидная, кубовидная, три клиновидных). Таранная зафиксирована между костями голени, участвует в образовании голеностопа, обеспечивая его гибкость. Пяточная кость – самая массивная в скелете стопы. Она выполняет функцию трамплина во время передвижения.
Плюсна включает в себя пять костей, которые по форме напоминают трубку и переходят в пальцы. Эти кости носят не названия, а римские номера от I до V.
Заканчивается стопа фалангами пальцев, между которыми располагаются подвижные суставы. Всего этот отдел включает четырнадцать костей, из них две кости имеет первый палец и по три содержат в своем составе все остальные. Этот отдел обеспечивает равновесие.
Всего этот отдел включает четырнадцать костей, из них две кости имеет первый палец и по три содержат в своем составе все остальные. Этот отдел обеспечивает равновесие.
Суставы и связки
Сустав — это место соединения костей. Он не только скрепляет кости, но и обеспечивает подвижность системы. Именно благодаря суставу кости образуют единый скелет.
Суставы
В анатомии нижних конечностей человека выделяют 4 важных системы суставов.
Тазобедренный сустав
Благодаря тазобедренному суставу может двигаться вся нижняя часть тела, это соединяющий компонент для конечностей и остальной части скелета.
Справка. Сустав – это подвижное соединение костей, то есть от него зависит все движение конечностей.
Тазобедренный сустав шаровидный, состоит из нескольких частей: вертлужной впадины, головки бедренной кости, суставной сумки с жидкостью внутри нее. Форма тазобедренного сустава обеспечивает движение конечностью во всех плоскостях.
Тазобедренный сустав укреплен следующими связками:
- подвздошно-бедренной;
- лобково-бедренной;
- седалищно-бедренной;
- круговой зоной;
- головкой бедра.
Коленный сустав
Коленный сустав образован соединением трех костей: бедренной, большеберцовой и надколенником, который чаще называют «коленной чашечкой». Этот сустав наиболее сложен в строении – в процессе сгибания надколенник ложится в специальное углубление, образованное наружным и внутренним выступом бедренной кости.
Поверхности всех трех костей сустава (надколенника, бедренной и большеберцовой костей) покрыты хрящом, благодаря которому обеспечивается процесс скольжения.
С внешней стороны сустав ограничен капсулой – синовиальной оболочкой.
Жидкость, находящаяся в капсуле, питает и смазывает хрящ, облегчает процесс скольжения, что сохраняет коленный сустав длительное время в здоровом состоянии.
Прочное положение костей относительно друг друга обеспечивают связки коленного сустава, среди которых: передняя крестообразная, задняя крестообразная, внутренняя боковая, наружная боковая связка.
Голеностопный сустав
Самый уязвимый сустав в человеческом скелете – голеностопный. Это место, где находится лодыжка, именно с его помощью соединяется кость на ноге над ступней с таранной и пяточной. В его состав входит система костей, связки и мышцы.
В отверстие между большой и малой берцовой костью входит отросток кости стопы. Вокруг этого соединения и формируется сустав. Кости голеностопного сустава распределяют давление веса человека на стопу.
Движение в суставе происходит за счет мышц и связок. Связки фиксируют кости сустава на своих местах в анатомически правильном положении. Они объединены в одну общую систему.
Суставы стопы
Стопа у человека образована большим количеством мелких костей, которые соединяются между собой различными видами суставов. Преимущественно они плоские с ограниченными движениями, кроме пястно-фаланговых и межфаланговых.
Связки нижних конечностей
Связка – это особое скопление соединительной ткани, которое укрепляет сустав. Они укрепляют, соединяют суставы и направляют движения в них. А связки стопы помогают человеку фиксировать тело в вертикальном положении.
Они укрепляют, соединяют суставы и направляют движения в них. А связки стопы помогают человеку фиксировать тело в вертикальном положении.
Мышцы ноги
Мышцы ног — самая обширная мускульная группа в организме человека. Они условно делятся на следующие отделы: ягодичные, мышцы передней и задней поверхностей бедра, голени и стопы.
Рассмотрим анатомию и мышечное строение каждой группы. Чтобы лучше понимать, о чем пойдет речь, обратите внимание на схему — из чего состоит нога человека.
Ягодичная группа
Мышцы ног начинаются с ягодичной группы. Она представлена тремя мышцами:
- большая ягодичная мышца — самая крупная мышца человека, отвечает за движение бедра, распрямление тела и удерживание его в одном положении;
- средняя ягодичная мышца (наружная мышца таза) — осуществляет движение ноги человека вперед и назад, фиксирует тело при его разгибании;
- малая ягодичная мышца — именно благодаря ей мы можем двигать ногами в стороны.
Передней части бедер
Квадрицепс – это четырехглавая мышца передней части бедра человека. Ее основная функция – разгибание ноги в колене. Она так называется потому, что состоит из четырех мышц (прямая, латеральная, промежуточная и медиальная). Но все мышцы квадрицепса человека в анатомии рассматриваются как самостоятельные.
Также к передней части бедра человека относятся приводящие мышцы. Они, в свою очередь, состоят из других мышц – тонкая, гребенчатая, портняжная и приводящая. Эта группа мышц отвечает за приведение бедра — движение конечности, направленное к средней линии тела.
Задней поверхности бедра
Эта группа мышц принимает участие в выпрямлении туловища и прямохождении. Они обеспечивают разгибание бедра в тазобедренном суставе и сгибание голени в коленном суставе.
Рассмотрим их подробнее:
- Двуглавая мышца. Второе ее название — бицепс бедра. Расположена под большой ягодичной мышцей. Основная ее функция – сгибание голени в колене.
- Полусухожильная мышца. Она тоже находится в задней части бедра. Помогает сгибать ногу в колене.
- Полупоперечная мышца. Находится на задней стороне бедра, начинается от седалищного бугра. Участвует в движениях при развороте голени вовнутрь. Также с ее помощью осуществляется движение бедра.
Мышцы голени
Мышцы голени, как и другие мышцы нижней конечности, хорошо развиты.
Эта группа мышц представлена:
- икроножной мышцей, которая занимает большую часть голени и отвечает за движение стопы и стабилизацию тела при ходьбе;
- камбаловидной — она располагается под икроножной и участвует в разгибании стопы в направлении подошвы;
- передней большеберцовой мышцей. Свое название получила неслучайно. Она начинается у большеберцовой кости. Благодаря ей человек может разгибать стопу и, следовательно, ходить.
Мышечный аппарат стопы
Мышцы ступни подразделяются на две группы в зависимости от своего расположения. К первой относятся мышцы тыльной стороны стопы, отвечающие за ее стабилизацию и разгибание пальцев.
Сгибанием пальцев, а также поддержкой сводов занимаются мышцы другой группы — подошвенные.
Кровоснабжение и иннервация
Как и все органы человеческого тела, кости нижних конечностей питаются артериальной кровью. Сеть мелких артерий проникает вглубь костного вещества, за счет чего верхняя часть ноги и низ получают кровь. Вокруг мельчайших артерий формируются остеоны – структурные единицы костного вещества.
Остеон – это костный цилиндр, в просвете которого проходит одна из артерий. В процессе роста происходит постоянная перестройка системы остеонов. Разрастается и сеть артерий. Вокруг артерий формируются новые остеоны, а старые разрушаются.
Бедра снабжаются кровью из бедренных вен, голени – из подколенных, отдающих множественные ветви, передних и задних большеберцовых артерий. На стопах формируется две сосудистых сети: на тыле стопы и на подошве. Подошву снабжают кровью ветви наружной и внутренней подошвенных артерий. Тыл – тыльная артерия стопы.
Кровоснабжение обеспечивает правильный обмен веществ, но этот процесс невозможен без нервной регуляции.
Нижние конечности иннервируются веточками крестцово-поясничного сплетения. Это бедренный нерв, седалищный, большеберцовый и малоберцовый. Нервные окончания также отвечают за чувствительность. Их узлы располагаются в надкостнице. Они позволяют нам чувствовать боль.
Функции нижних конечностей
Нижние конечности человека выполняют опорную и двигательную функции. Благодаря слаженной работе суставов, связок и мышечных соединений выполняется амортизация движений тела при ходьбе, беге или прыжках.
Заключение
Работа скелета, суставов, мышц, нервных окончаний и кровеносной системы нижних конечностей помогает человеку передвигаться вертикально. А прямохождение — основная функция ног.
Теперь вы знаете, что каркас нижней конечности состоит из костей бедра, голени и стопы. Мускулатура делится на ягодичный отдел, мышцы передней и задней поверхностей бедра, голени и стопы. А кровоснабжение и иннервация обеспечивают питание и полноценный обмен веществ.
Источник: https://revmatolog.org/nogi/kak-ustroena-noga-cheloveka.html
Анатомический скелет человека — туловища, верхних и нижних конечностей, головы: строение с названием и функцией костей, фото спереди, сбоку, сзади, количество, состав, части, вес костей, схема, описание. Из каких основных частей состоит скелет человека?
В статье вы познакомитесь со строением скелета человека и узнаете названия костей.
Содержание статьи
- Скелет человека — строение с названием костей: схема, фото спереди, сбоку, сзади, описание
- Основные части скелета человека, количество, вес костей
- Какая ткань является основой костей скелета, какое вещество придает скелету человека прочность, каков состав костей?
- Анатомический скелет грудной клетки, таза человека: схема, описание
- Анатомический скелет руки, кисти человека: схема, описание
- Анатомический скелет плеча и предплечья человека: схема, описание
- Анатомический скелет шеи, черепа человека: схема, описание
- Анатомический скелет ноги, стопы человека: схема, описание
- Какие кости в скелете человека соединяются подвижно с помощью сустава и неподвижно?
- Чем соединены между собой кости скелета человека?
- Какова роль скелета человека, что обеспечивает подвижность, что относят к механической функции костей скелета?
- Каковы особенности строения скелета человека, связанные с прямохождением?
- До скольки лет растет скелет человека?
- Какие кости являются трубчатыми в скелете человека?
- Какая самая длинная, массивная, крепкая и маленькая кость в скелете человека?
- Видео: «Строение скелета»
Скелет человека — строение с названием костей: схема, фото спереди, сбоку, сзади, описание
Все известно, что скелет – костная система человека. Скелет – это совокупность, состоящая из пассивных и подвижных костей. Без скелета просто не сможет держаться тело человека: все его внутренние органы и мягкие ткани, мышцы.
ИНТЕРЕСНО: В человеческом взрослом сформированном теле в общей сложности содержится около 200 костей. Но в теле новорожденного количество костей существенно больше – их 270! Это очень просто объяснить – через время маленькие косточки формируются в большие.
Все кости в скелете соединены с помощью связок и суставов (виды соединительных тканей). Удивительно, но на разных этапах жизни человек переживает множество трансформаций своего скелета. Самая удивительная из них — преобразование хрящевого скелета в костный.
Проекция скелета со всех сторон
Основные части скелета человека, количество, вес костей
Скелет условно делится на две группы:
Остевой скелет:
- Череп – «кость» головы. Именно в этой кости помещен один из самых главных внутренних органов человеческого тела – мозг.
- Грудная клетка – «вместилище» важнейших внутренних органов, их «корпус» и защита. В клетке 12 позвонков и столько же пар ребер.
- Позвоночник – это ось тела, в которой проходит спинной мозг.
Добавочный скелет:
- Пояс верхних конечностей (лопатки и ключицы)
- Верхние конечности
- Пояс нижних конечностей
- Нижние конечности
Описание всех костей человека
Какая ткань является основой костей скелета, какое вещество придает скелету человека прочность, каков состав костей?
Скелет – самая твердая, прочная и крепкая основа организма. У него есть важнейшие функции, без которых жизнь человека была бы просто невозможной. Он обеспечивает опору, способность двигаться, защищает внутренние органы.
Скелет состоит из костей, а кость из костной ткани. Что же представляет из себя костная ткань? Это вид соединительной ткани. Мало кто знает, что внутри кости есть нервы и кровеносные сосуды. У клеток костной ткани наблюдается большое количество отростков, окруженных особыми «каналами» с жидкостью. Именно через эту жидкость и происходит «дыхание» клеток.
Данная жидкость называется «межклеточная» и состоит она из органических веществ (белок) и неорганических (соли кальция и калия). Данный состав позволяет костям быть гибкими и упругими одновременно.
ИНТЕРЕСНО: Удивительно, что детские кости отличаются тем, что являются более гибкими, а кости взрослых людей намного прочнее.
Анатомический скелет грудной клетки, таза человека: схема, описание
Изучите подробное фото грудной клетки, чтобы увидеть каждую кость и узнать ее название.
Грудная клетка человека:
- Две боковые стороны
- Задняя сторона
- Передняя сторона
Грудная клетка состоит из:
- Грудных позвонков
- Ребра
- Грудная кость (грудина)
- Верхняя и средняя рукоятка
- Мечевидный отросток
Особенности строения грудной клетки:
- Первое ребро лежит горизонтально
- Ребра соединяются с грудиной хрящами
- В грудной клетке «прячутся» важнейшие внутренние органы
ИНТЕРЕСНО: Грудная клетка помогает человеку дышать, помогая движениями уменьшить или увеличить объем воздуха в легких. Грудная клетка мужчин больше, чем у женщин, но женская – шире.
Анатомический скелет руки, кисти человека: схема, описание
Рука человека состоит из множества костей.
Рука делиться на три части:
Важно знать:
- Костная основа плеча – плечевая кость
- Костная основа предплечья – локтевая и лучевая кость
- Кисть состоит из 27 отдельных костей
- Пясть содержит 5 костей
- Скелет пальцев состоит из 14 фаланг
Анатомический скелет плеча и предплечья человека: схема, описание
Здесь вы можете подробно рассмотреть кости плеча и предплечья с названиями.
Анатомический скелет шеи, черепа человека: схема, описание
На картинках подробно изображены все важные кости человека.
Анатомический скелет ноги, стопы человека: схема, описание
Нога человека также имеет множество костей.
Какие кости в скелете человека соединяются подвижно с помощью сустава и неподвижно?
Важно знать о том, какие кости в скелете человека подвижно соединяются суставами или неподвижно.
Чем соединены между собой кости скелета человека?
Кости в человеческом теле могут соединяться с помощью:
Какова роль скелета человека, что обеспечивает подвижность, что относят к механической функции костей скелета?
Функции:
- Опорно-двигательная (опора тела и крепление мягких тканей, органов, подвижность тела).
- Передвижения (транспортировка тела)
- Рессорная (смягчение точки сотрясения)
- Защитная (защита внутренних органов от травм)
Каковы особенности строения скелета человека, связанные с прямохождением?
Человеческий скелет можно охарактеризовать тем, что он имеет вертикальное положение. Позвоночник держится прямо, но имеет изгибы. Во время хождения он способен «пружиниться», смягчая все толчки. Из-за того, что человек ходит прямо, грудная клетка его расширена.
Рука – орган труда, большой палец отстранен и развит так, чтобы было удобно захватывать и держать предмет. Пояс имеет вид чаши и является опорой для органов таза. Нижние конечности сильнее рук и уверенно держат «тяжелый» корпус.
До скольки лет растет скелет человека?
Человеческий скелет переживает несколько активных этапов формирования:
- Первый «ранний»: от 0 до 7-ми лет
- Второй «подростковый»: с 11 до 17-ти лет
- Третий «окончательный»: у женщин до 25-ти лет, у мужчин до 30-ти.
Какие кости являются трубчатыми в скелете человека?
Длинные трубчатые:
- Бедренная
- Большеберцовая
- Малоберцовая
Короткотрубчатые:
- Плюсневые
- Фаланговые
- Пястные
Какая самая длинная, массивная, крепкая и маленькая кость в скелете человека?
- Самая длинная кость – бедренная
- Самая большая – большеберцовая
- Самая крепкая – бедренная
- Самая маленькая – «наковальня» или «стремя» (в ухе)
Видео: «Строение скелета»
Источник: https://babyben.ru/zdorove/anatomicheskij-skelet-cheloveka-tulovishha-verhnih-i-nizhnih-konechnostej-golovy-stroenie-s-nazvaniem-i-funkciej-kostej-foto-speredi-sboku-szadi-kolichestvo-sostav-chasti-ves-kostej-shema.html
кости и мышцы, их повреждения и заболевания
Почему так важно знать строение ноги ниже колена? Нога представляет собой парный орган, выполняющий опорную и двигательную функции в жизни человека. Анатомически конечность представляет сложную структуру с большим количеством связок, мышц, костей и сухожилий. Каждый из них выполняет свою функцию.
Анатомия нижних конечностей
Анатомически ноги включает в себя такие части:
- бедра;
- голени;
- стопы.
Бедро состоит из таких частей, как бедренная кость и надколенник. Он отвечает за защиту коленного сустава. За прочность суставов отвечают связки. Треугольная связка – это амортизатор при ходьбе, поскольку она предупреждает перелом дна суставной впадины.
Самая мощная связка – это подвздошно – бедренная связка. Без отклонений от нормы ее толщина 7 мм, а ширина достигает 7 – 8 см. Основная ее функция заключается в том, чтобы ограничивать движения бедра назад.
Голень включает в себя большую и малую берцовые кости, которые заканчиваются внизу лодыжками. Они соединены надколенником. В голени выделяют 2 области:
- передняя;
- задняя.
Тазобедренный сустав представляет собой соединение бедренной и тазовой кости. Он имеет ореховидную форму. На суставной поверхности находится слой гладкого хряща. Тазобедренный сустав считается самым глубоким и прочным. За его подвижность и силу отвечают связки.
Коленный сустав включает в себя бедренную и берцовую кости, а голеностопный – берцовые кости и кости стопы. Он является самым большим и сложным из всех имеющихся сочленений. Именно от коленного сустава зависит размах движений при беге или ходьбе.
Большеберцовая кость состоит из трех областей:
- Медиальная область имеет выпуклую форму. Она легко прощупывается под кожным покровом.
- Латеральная поверхность имеет вогнутую форму.
- Задняя часть большеберцовой кости покрыта камбаловидной мышцей. При ее повреждении необходимо обратиться за помощью к травматологу.
Малоберцовая кость по размеру длинная, располагается латерально. Сверху у нее находится уплотненная головка, соединенная с большеберцовой костью, а внизу имеет утолщение.
Для ограничения движений в суставе, защиты и удержания костных структур друг с другом предназначены связки голеностопного сустава. Специалисты по анатомии разделили их на 3 группы:
- Волокна, благодаря которым кости голени соединены.
- Внешние боковые волокна.
- Боковые внутренние связки.
В креплении всех составных частей конечности и движении участвуют также мышцы. Каждая из них имеет определенную точку фиксации на стопе. Мышцы голени имеют веретенообразную структуру. В дистальной области они переходят в длинные сухожилия, которые прикреплены к костям стопы:
- Камбаловидная мышца довольно уплотненная в средней части. Она соединена с задней поверхностью большеберцовой и малоберцовой костей.
- Мышца, отвечающая за отвод мизинца, находится на латерально – подошвенной части стопы в конце.
- Функцию сгибания голени и ее пронацию выполняет подколенная мышца.
Очень важно знать строение ноги человека ниже колена, чтобы правильно оказать первую помощь себе или другому человеку при несчастном случае и прочих обстоятельствах.
В организме существует самое крупное сухожилие. Оно называется ахилловым и находится в заднем отделе голеностопа. В течение жизни человека сухожилие может подвергаться растяжениям и разрывам. В таких случаях следует незамедлительно обращаться к травматологу и начинать комплексное лечение.
Важно! В образовании ахиллова сухожилия участвуют плоские сухожилия задних мышц голени. Разрыв нижней части конечности зачастую возникает у футболистов и волейболистов, а также при падении с высоты на нижнюю конечность.
Иногда разрыв ахиллова сухожилия происходит в результате снижения прочности волокон сухожилия. Это связано с тем, что основная составная часть сухожилия – коллаген становится недостаточно прочным. Тогда специалисты назначают кортикостероиды и антибиотики.
Диагностика
В голеностопном суставе могут возникать различные заболевания. Чтобы правильно установить диагноз, и какими причинами были вызваны болевые ощущения у пациента, потребуется один из перечисленных способов диагностики:
- ультразвуковое исследование;
- атроскопия;
- рентгенография;
- МРТ;
- Компьютерная томография.
Также специалист проводит личный осмотр пациента, на основании всей информации ставит точный диагноз и назначает определенные препараты и физиотерапевтические процедуры.
Заболевания, поражающие голеностопный сустав
Чаще всего в медицинской практике встречаются следующие патологии голеностопного сустава:
- артрит;
- артроз;
- разрывы ахиллова сухожилия;
- переломы, вывихи.
Болеть ноги ниже колена могут из – за наличия заболевания позвоночника. Оно способствует сдавливанию нервного корешка, вследствие чего пациент чувствует боль при резких движениях и ощупывании голени.
Если у человека диагностирован остеомиелит большеберцовой или малоберцовой костей, то болевой синдром сопровождается гнойными выделениями через имеющийся на коже открытый свищ. Их интенсивность зависит от того, в каком состоянии находится иммунитет пациента.
Чтобы предотвратить появление артроза и артрита, необходимо следовать таким правилам:
- Уменьшить физические нагрузки на нижние конечности.
- При наличии у пациента лишнего веса ему следует сесть на диеты.
- Следует правильно выбирать обувь, она должна быть комфортной и на удобном каблуке.
- В сидячем положении не рекомендуется скрещивать ноги.
- Также следует избегать частых стрессов.
- Соблюдать режим сна и вести активный образ жизни, отказавшись от курения и употребления алкоголя.
Для большинства патологий, которые поражают конечности ниже колена, характерно «движение мурашек» на ранних стадиях. Со временем начинает проявляться боль, которая беспокоит человека в течение всего дня при любых движениях.
Осложнения, вызванные патологиями суставов нижних конечностей
Если своевременно не начать лечить травму, артроз или артрит, то у пациента может возникнуть одно из осложнений:
- Разрушение или деформация сустава.
- Отсутствие возможности передвижения.
- Нарушение функционирования позвоночника.
- Грыжи межпозвонковых дисков.
- Ухудшение качества жизни.
Лучше не допускать осложнений, поскольку они хуже и дольше поддаются лечению.
Почему отекают ноги?
Довольно часто встречаются случаи, когда у пациента отекают ноги от колена до ступни. Такая проблема возникает не только у людей пожилого возраста, но и у молодых. Это связано с неправильным образом жизни, который провоцирует патологии суставов и нарушение кровообращения. При поражении обоих ног возможны серьезные заболевания сердца или печени.
Почему вечером чешутся ноги? Узнайте тут.
Одной из опасных патологий является тромбоз, который поражает глубокие вены. Он провоцирует развитие кровяных сгустков, опасных для всего человеческого организма. Они могут достигать больших размеров, перекрывая просвет в венах. В результате чего жидкость не может нормально функционировать в конечности.
Самостоятельно от этого недуга не избавиться, поэтому стоит при первых симптомах обратиться за медицинской помощью, иначе тромбоз перейдет в хроническую форму. Специалист назначит правильное лечение, ориентируясь на выраженные признаки у пациента и сопутствующие патологии, если таковы имеются. Следует контролировать водно – солевой баланс и исключить из рациона питания поваренную соль.
Скелет нижней конечности
В скелете нижней конечности выделяют пояс нижней конечности (тазовые кости) и свободную часть нижней конечности (парные бедренная кость, надколенник, кости голени — большеберцовая и малоберцовая — и кости стопы).
Парная тазовая кость (os coxae) (рис. 39), образующая пояс нижней конечности (cingulum membri inferioris), в свою очередь, состоит из сросшихся лобковой (os pubis), подвздошной (os ilium) и седалищной (os ischii) костей. Вместе с крестцом и копчиком они образуют костную основу таза. До подросткового возраста (14–17 лет) составляющие тазовую кость лобковая, подвздошная и седалищная кости существуют отдельно, соединенные друг с другом хрящом.
Рис. 39. Тазовая кость и скелет свободной части нижней конечности:
1 — крестец; 2 — тазовая кость; 3 — берцовая кость; 4 — надколенник; 5 — малоберцовая кость; 6 — большеберцовая кость; 7 — кости стопы
Пояс нижней конечности
В скелете тазового пояса соединяются между собой правая и левая тазовые кости (посредством лобкового сращения) и каждая из тазовых костей и крестец с образованием крестцово-подвздошного сустава. Образованный в результате этих соединений костный таз обеспечивает распределение и передачу веса тела на кости нижней конечности и защиту органов таза.
Тазовая кость в целом имеет неправильную форму; на ее наружной поверхности находится вертлужная впадина (acetabulum) (рис. 40, 43) — сферическое углубление, служащее для соединения с тазовой костью головки бедренной кости и ограниченное суставной полулунной поверхностью (fasies lunata) (рис. 40). В образовании вертлужной впадины участвуют как лобковая и подвздошная, так и седалищная кость. Их взаимное расположение относительно вертлужной впадины помогает выделять эти кости на теле тазовой кости.
В строении лобковой кости (рис. 39), расположенной спереди-снизу от вертлужной впадины, выделяют тело (corpus ossis pubis) (рис. 41), верхнюю ветвь (r. superior ossis pubis) (рис. 40, 41) и нижнюю ветвь (r. inferior ossis pubis) (рис. 40, 41) лобковой кости. В образовании вертлужной впадины участвует тело лобковой кости. На верхнем крае верхней ветви лобковой кости расположены лобковый гребень (crista pubica) (рис. 40, 41) и лобковый бугорок (tuberculum pubicum) (рис. 40, 42), на нижнем крае — запирательный гребень (crista obturatoria) (рис. 41), в заднем отделе которого имеется передний запирательный бугорок (tuberculum obturatorium anterius) (рис. 41). На внутренней стороне каждой из лобковых костей, в месте перехода ее верхней ветви в нижнюю, расположена шероховатая (симфизиальная) поверхность (facies symphysialis) (рис. 41) овальной формы. Последняя служит для соединения с другой лобковой костью с образованием лобкового сращения (simphisis ossium pubis).
Подвздошная кость находится сверху-сзади от вертлужной впадины, в образовании которой она также участвует. В строении подвздошной кости выделяют короткое и массивное тело подвздошной кости (corpus ossis ilii) (рис. 40, 41) и крыло (ala ossis ilii) (рис. 40, 41), под которым на внутренней поверхности проходит дугообразная линия (linea arcuata) (рис. 41). Верхний край крыла — подвздошный гребень (crista iliaca) (рис. 41, 42) — имеет на своем переднем и заднем крае по два выступа. Эти выступы называются соответственно верхней передней (spina iliaca anterior superior) (рис. 40, 41, 42) и нижней передней (spina iliaca anterior inferior) (рис. 40, 41, 42) подвздошными остями и верхней задней (spina iliaca posterior superior) (рис. 40, 41) и нижней задней подвздошными остями (spina iliaca posterior inferior) (рис. 40, 41). Внутренняя поверхность крыла образует обширную подвздошную ямку (fossa iliaca) (рис. 41, 42) с гладкой, полого спускающейся поверхностью. Ягодичная поверхность крыла имеет переднюю (linea glutea anterior) (рис. 40), заднюю (linea glutea posterior) (рис. 40) и нижнюю (linea glutea inferior) (рис. 40) ягодичные линии, служащие местами прикрепления мышц. На крестцово-тазовой поверхности крыла расположена ушковидная поверхность (facies auricularis) (рис. 41), посредством которой подвздошная кость сочленяется с подвздошной бугристостью (tuberositas iliaca) (рис. 41) и крестцом. С крестцом подвздошные кости образуют полусустав (articulatio sacroiliaca).
Рис. 40. Тазовая кость (вид снаружи):
1 — крыло подвздошной кости; 2 — передняя ягодичная линия; 3 — задняя ягодичная линия; 4 — верхняя передняя подвздошная ость; 5 — верхняя задняя подвздошная ость; 6 — нижняя задняя подвздошная ость; 7 — большая седалищная вырезка; 8 — нижняя ягодичная вырезка; 9 — нижняя передняя подвздошная ость; 10 — тело подвздошной кости; 11 — полулунная поверхность; 12 — вертлужная впадина; 13 — малая седалищная вырезка; 14 — тело седалищной кости; 15 — верхняя ветвь лобковой кости; 16 — лобковый бугорок; 17 — запирательное отверстие; 18 — нижняя ветвь лобковой кости; 19 — седалищный бугор; 20 — ветвь седалищной кости
Рис. 41. Тазовая кость (вид изнутри):
1 — подвздошный гребень; 2 — подвздошная ямка; 3 — подвздошная бугристость; 4 — крыло подвздошной кости; 5 — верхняя задняя подвздошная ость; 6 — верхняя передняя подвздошная ость; 7 — ушковидная поверхность; 8 — нижняя задняя подвздошная ость; 9 — нижняя передняя подвздошная ость; 10 — дугообразная линия; 11 — большая седалищная вырезка; 12 — тело подвздошной кости; 13 — тело седалищной кости; 14 — тело лобковой кости; 15 — седалищная ость; 16 — лобковый гребень; 17 — запирательный гребень; 18 — передний запирательный бугорок; 19 — верхняя ветвь лобковой кости; 20 — ветвь седалищной кости; 21 — шероховатая поверхность; 22 — запирательное отверстие; 23 — нижняя ветвь лобковой кости
Седалищная кость расположена снизу-сзади относительно вертлужной впадины. В строении седалищной кости также выделяют тело (corpus ossis ischii) (рис. 40, 41), которое участвует в образовании вертлужной впадины, и ветвь (r. ossis ischii) (рис. 40, 41). В месте соединения тела и ветви седалищной кости находится массивное утолщение — седалищный бугор (tuber ischiadicum) (рис. 40), над которым располагается седалищная ость (spina ischiadica) (рис. 41, 42). По обеим сторонам от седалищной ости находятся большая (incisura ischadica major) (рис. 40, 41) и малая (incisura ischadica minor) (рис. 40) седалищные вырезки. Тела и ветви седалищной и лобковой костей, смыкаясь, образуют границы запирательного отверстия (foramen obturatum) (рис. 40, 41, 43).
Соединенные между собой копчик, крестец и тазовые кости составляют собственно костный таз (pelvis). В нем располагаются органы пищеварительной и мочеполовой систем, крупные сосуды и нервы. Этот костный остов таза подразделяется на верхний и нижний отделы — большой и малый таз.
Рис. 42. Вход в полость малого таза
А — мужского; Б — женского: 1 — подвздошная ямка; 2 — основание крестца; 3 — подвздошный гребень; 4 — верхняя передняя подвздошная ость; 5 — седалищная ость; 6 — нижняя передняя подвздошная ость; 7 — копчик; 8 — лобковый гребень; 9 — лобковый бугорок
Рис. 43. Таз (вид спереди):
А — мужской; Б — женский: 1 — большой таз; 2 — крестец; 3 — пограничная линия; 4 — малый таз; 5 — вертлужная впадина; 6 — запирательное отверстие; 7 — подлобковый угол; 8 — лобковая дуга
Большой таз (pelvis major) (рис. 43) имеет открытую переднюю стенку, с боков ограничивается крыльями подвздошной кости, а сзади — основанием крестцовой кости и нижними поясничными позвонками. По гребешку лобковой кости и дугообразной линии подвздошной кости проходит пограничная линия (linea terminalis) (рис. 43), которая является нижней границей большого таза. Ниже пограничной линии располагается малый таз (pelvis minor) (рис. 43), который представляет собой полость цилиндрической формы. Боковые стенки малого таза образованы нижней частью тел подвздошных костей, седалищными костями, передние стенки — лобковыми костями, а задние — крестцовой и копчиковой. Соединяясь под углом, лобковые кости образуют у мужчин подлобковый угол (angulus subpubicus) (рис. 43), а у женщин лобковую дугу (arcus pubis) (рис. 43). Середины прямых диаметров входа и выхода малого таза соединяются осью таза (axis pelvis).
В месте перехода большого таза в малый образуется верхнее отверстие таза (apertura pelvis superior). Нижнее отверстие таза (apertura pelvis inferior) с боков органичивают седалищные бугры, спереди — лонное сращение и нижние ветви лобковых костей, а сзади — копчиковая кость.
В строении костной основы таза особенно заметно проявляется половой диморфизм. Объясняется это тем, что у женщин устройство и способ соединения тазовых костей призваны, помимо чисто механических задач, обеспечивать успешное прохождение родов. В частности, во время беременности внутренняя полость малого таза может увеличиваться за счет разрыхления хрящевого межлобкового диска и, соответственно, расширения симфиза.
Женский таз более широкий и низкий, с развернутыми в стороны крыльями подвздошных костей. Нижние ветви лобковых костей сходятся по широкой дуге, а малый таз имеет форму широкого цилиндра. Верхняя апертура малого таза близка по форме к овальной, симфиз более широкий и низко расположенный, нежели в мужском тазе.
Мужской таз, по сравнению с женским, более высокий и узкий, с менее развернутыми крыльями подвздошных костей. Нижние ветви лобковых костей сходятся под острым углом, полость малого таза снизу заметно сужается, противоположные седалищные бугры и ости расположены ближе друг к другу. Верхняя и нижняя апертуры мужского малого таза значительно отличаются по размерам и форме от соответствующих апертур женского за счет более заметно выдающегося мыса крестцовой кости, а также за счет копчика, более резко выступающего в просвет выхода из малого таза.
Сводка нижних конечностей — ANAT20006 — Unimelb
сводка структур нижних конечностей (кости, суставы, мышцы, сосуды и нервы)
Комментарии
- Пожалуйста, войдите или зарегистрируйтесь, чтобы оставлять комментарии.
Предварительный текст
ЛЕКЦИЯ 6.3, 7.1, 7.2 НИЖНЯЯ КОНЕЧНОСТЬ 1. КОСТИ Крестец копчика Os coxae Тазовая кость седалищная кость: прикрепление мышц задней поверхности бедра Лобковая кость: прикрепление приводящих мышц. Подвздошная кость: прикрепление ягодичных мышц. Особенности и функции: Интерфейс между позвоночником и нижней конечностью Образует прочное целостное кольцо костей Для переноса веса Защищает содержимое Стабильность Сильная связочная поддержка Крестцово-подвздошный сустав Сустав в плоскости синовиальной плоскости Поддерживается межкостная связка Крестцово-копчиковый сустав Хрящевой сустав Лобковый симфиз Хрящевой сустав Тазобедренный сустав Движение шаровидного сустава в 3-х плоскостях Очень стабильная верхняя губа углубляет лунку и улучшает конгруэнтность Суставная капсула укрепляет связки Подвздошно-бедренная связка Спираль и сужается с тазобедренным суставом Лобно-бедренная связка Ишиофеморальная связка 3.МЫШЦЫ Передний отсек Мышцы-разгибатели бедра Подвздошно-поясничная мышца Подвздошно-поясничная мышца Большая поясничная мышца Разгибатели и отводящие мышцы бедра Ягодичные мышцы Большая ягодичная мышца Силовые разгибания Средняя ягодичная мышца Минимальная ягодичная мышца Отведение бедра В первую очередь поддержание положения таза в движении ЛЕКЦИЯ 6.3, 7.1, 7.2 НИЖНЯЯ ЧАСТЬ 1. КОСТИ Бедренная кость Длинная кость Голова и шея Прикрепление мышц вертела Терка вертел Малый вертел Мыщелки вала Медиальный и латеральный эпикондилы Медиальная и латеральная Костные трабекулы 2 основные системы, пересекающие дугообразный пучок Сопротивление растягивающим силам мышц Вертикальный пучок Сопротивление силам опоры большеберцовой кости Длинная кость Медиальный аспект Больше нагрузка на кости Плато большеберцовой кости Шарнирное соединение в коленном суставе Бугристость большеберцовой кости Прикрепление мышц Медиальная лодыжка Трохлеарная выемка Сочленение голеностопного сустава Малоберцовая кость Длинная кость Боковой аспект Боковая лодыжка Прикреплена к межкостной мембране большеберцовой кости Нет вращения относительно друг друга Нет лодыжечного паза Гнездо сформировано латеральные и медиальные лодыжки ЛЕКЦИЯ 6.3, 7.1, 7.2 НИЖНЯЯ КОНЕЧНОСТЬ Тибиофибулярные суставы Верхние тибиофибулярные суставы Плоский синовиальный сустав Позволяет скользящее движение Опора связок Нижний тибиофибулярный сустав Фиброзный сустав Синдесмоз Предотвращает разъединение большеберцовой и малоберцовой костей. Vastus medialis Поддерживает нормальное выравнивание надколенника. Сопротивление латеральному растяжению надколенника. Слабость приводит к латеральному вывиху надколенника. Дегенерация хряща. мышцы бедра Приводящие мышцы бедра Общий источник боли и патологии в паховой области 3.ЛЕКЦИЯ 6.3, 7.1, 7.2 МЫШЦЫ НИЖНЕЙ КОНЕЧНОСТИ НОЖКИ Глубокая фасция Разделяет мышечные отсеки и мышцы Травма в одном отсеке: синдром компартмента Передний отсек Голеностопный сустав (пальцы ног к ноге) Tibialis anterior Разгибатели пальцев Extensor hallucis longus (EHL) большой палец Extensor digitorum longus (EDL) ) пальцев Пройдите через удерживатель разгибателя заднего отдела голеностопного сустава (пальцы на расстоянии от ноги) Поверхностно: Gastrocnemius Power Plantaris Soleus Медленно сокращающиеся мышцы Венозные синусы Глубокие: Tibialis posterior Flexor hallucis longus (FHL) сгибатель большого пальца Большой палец сгибателя пальцев (FDL) сгибатели пальцев Боковой отдел Стопа эвертеры в подтаранном суставе Проприоцептивная роль при растяжении связок голеностопного сустава Длинная малоберцовая мышца Fibularis longus Короткая малоберцовая мышца Fibularis brevis Тарзальный канал Сухожилия кровеносных сосудов, проходящих через ЛЕКЦИЮ 6.3, 7.1, 7.2 НЕРВЫ НИЖНИХ КОНЕЧНОСТЕЙ И СОСУДЫ НИЖНИХ КОНЕЧНОСТЕЙ Артерии нижних конечностей Начинаются в месте соединения нижней конечности и таза Ветви от нисходящей аорты Подвздошная артерия RL Внутренняя подвздошная артерия Обеспечивает область таза Наружная подвздошная артерия Вход в нижнюю конечность спереди Бедренная артерия Основное кровоснабжение нижней конечности. Profunda femoris. Глубокая ветвь. Обеспечивает кровоснабжение шейки бедра, анастомозов между ветвями profunda femoris. Проходит медиально и кзади, к заднему отделу. Через перемычку приводящей мышцы. Po. Робототехника в реабилитации нижних конечностей после инсульта.
С С увеличением числа пожилых людей инсульт стал распространенным заболеванием, часто приводящим к двигательной дисфункции и даже стойкой инвалидности.Роботы для реабилитации нижних конечностей могут помочь пациентам проводить разумные и эффективные тренировки для улучшения двигательной функции парализованной конечности. В этой статье рассматривается развитие роботов для реабилитации нижних конечностей за последние десятилетия. В частности, мы предоставляем классификацию, сравнение и обзор конструкции режимов вождения, парадигмы обучения и стратегии управления роботами для реабилитации нижних конечностей в рассмотренной литературе. Также представлен краткий обзор технологии определения походки реабилитационных роботов для нижних конечностей.Наконец, мы обсудим будущие направления роботов для реабилитации нижних конечностей.
1. Введение
Инсульт — это заболевание, которое может привести к инвалидности у пожилых людей [1]. С увеличением числа пожилых людей инсульт стал распространенным заболеванием, которое часто приводит к двигательной дисфункции или даже к стойкой инвалидности [2]. Ежегодно в США проживает около 795 000 человек, а в Японии — около 191 000 человек, перенесших новый или повторный инсульт [3].Число новых пациентов с инсультом в Китае составляет около 200 миллионов ежегодно [4]. Согласно национальной статистике инсульта, заболеваемость, смертность и частота рецидивов увеличиваются с возрастом [5]. В то же время заболеваемость инсультом в последние годы стала более молодой. В результате реабилитационная подготовка лиц, перенесших инсульт, срочно превратилась в серьезную социальную проблему. Однако традиционные мануальные методы лечения, такие как физиотерапия (PT) и профессиональная терапия (OT), в основном зависят от опыта терапевта, и им трудно удовлетворить требования высокоинтенсивных и повторяющихся тренировок [6].Из-за серьезной нехватки физиотерапевтов лечение не может быть гарантировано [7]. В результате значительно возрастает спрос на современное реабилитационное оборудование, которое поможет пациентам выполнять точные, количественные и эффективные тренировки [8]. Реабилитационная робототехника — это новая область, которая, как ожидается, станет решением для автоматизированного обучения. За последнее десятилетие реабилитационные роботы привлекли все большее внимание исследователей, а также врачей-реабилитологов. Применение реабилитационного робота может освободить врачей от тяжелых тренировочных задач, проанализировать данные робота во время тренировочного процесса и оценить реабилитационный статус пациента.Благодаря преимуществам точности и надежности реабилитационные роботы могут обеспечить эффективный способ улучшить исход инсульта или послеоперационной реабилитации.
В настоящее время опубликовано несколько обзорных статей по роботам для реабилитации нижних конечностей. Тем не менее, роботу для реабилитации нижних конечностей было предоставлено очень мало деталей о стратегиях управления, режимах вождения, режимах тренировки и восприятии походки.
В этой статье мы систематически рассмотрели текущие разработки роботов для реабилитации нижних конечностей, предоставив классификацию, сравнение и обзор конструкции режимов вождения, парадигмы тренировки, стратегии управления и восприятия походки.Оставшаяся часть теста организована следующим образом. В разделе 2 описана разработка роботов. В разделе 3 представлены режимы движения робота-реабилитолога нижних конечностей. В разделе 4 представлены стратегии управления, включая управление положением, управление сигналом силы и управление биологическим медицинским сигналом. В разделе 5 была рекомендована схема обучения робота. В Разделе 6 были проанализированы различные техники восприятия походки. В разделе 7 обсуждались и резюмировались ограничения исследования и будущее направление развития.
2. Разработка роботов для реабилитации нижних конечностей
В последние годы были разработаны различные типы роботов для реабилитации нижних конечностей для улучшения двигательной функции парализованных конечностей у пациентов с инсультом. В целом роботов для реабилитации нижних конечностей можно разделить на две категории: роботов с экзоскелетами и роботов с конечным эффектором [9]. Например, Lokomat [10], BLEEX [11] и LOPES [12, 13] являются типичными роботами-экзоскелетами, а Rutgers Ankle [14] и Haptic Walker [15] — конечными эффекторными роботами.В соответствии с принципами реабилитации, роботы-экзоскелеты можно разделить на ортезы на беговой дорожке и ортезы для ног, в то время как роботы с конечным эффектором имеют типы на основе подножки и на платформе. Обзор последних типичных роботов и их характеристики представлены в таблице 1.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
2.1. Роботы-экзоскелеты на беговой дорожке
Lokomat, LokoHelp, Lopes и экзоскелет Active Leg (ALEX) относятся к типичным роботам-экзоскелетам на беговой дорожке. Экзоскелетные роботы на беговой дорожке обычно состоят из системы поддержки веса и движутся на беговой дорожке через раму экзоскелета нижних конечностей.
В 2001 году Швейцарский федеральный технологический институт в Цюрихе [33] разработал робот Lokomat для реабилитации походки типа экзоскелета с четырьмя свободными движениями с использованием беговых дорожек.Экзоскелет может приводить в движение ногу пациента, чтобы реализовать движение походки в сагиттальной плоскости, а четыре поворотных шарнира приводятся в движение четырьмя двигателями постоянного тока для передачи точной шарико-винтовой передачи.
LokoHelp — это робот для тренировки ходьбы, разработанный и произведенный немецкой компанией, состоящий из трех частей, устройства фиксации ноги, системы беговой дорожки и системы подвески груза. С его помощью можно пройти базовую тренировку по восстановлению походки и помочь пациентам выполнить упражнение на спуске.Кроме того, в оборудовании применен метод модульной конструкции, который легко собирать, разбирать и настраивать, чтобы проводить тренировки на разных склонах. Клинические экспериментальные исследования LokoHelp доказали [34, 35], что реабилитационный эффект роботизированной системы почти такой же, как и у традиционного метода тренировки ходьбы, но при этом значительно сокращаются требуемые человеческие ресурсы и физические нагрузки участников.
Лаборатория биомедицинской инженерии Университета Твенте [36], Голландия, разработала робота для восстановления походки с приводом от экзоскелета (LOPES) [37, 38].Одиночная нога LOPES имеет 2 степени свободы в тазобедренном суставе и 1 степень свободы в коленном суставе. LOPES разделил выздоровление пациента на два этапа: доминирующий пациент и управляемый роботом, и используются различные алгоритмы управления, чтобы сделать обучение пациентов ходьбе ближе к реальной ситуации.
Школа машиностроения Университета Делавэра разработала активного тренировочного робота под названием ALEX. Он состоит из подвижного кронштейна, ортеза экзоскелета нижней конечности и системы управления.Каждая нога имеет четыре степени свободы, две степени свободы тазобедренного сустава и одну степень свободы коленного и голеностопного суставов. Задняя часть ALEX, использующая механические механизмы для уравновешивания силы тяжести человеческого тела, может помочь пациентам достичь баланса силы тяжести и регулировки высоты [39, 40].
2.2. Ортезы для ног и экзоскелеты
Активный ортез голеностопного сустава (AAFO) [41], ортез коленного сустава-голеностопного сустава (KAFO), экзоскелет нижних конечностей Беркли (BLEEX) и гибридная вспомогательная конечность (HAL) относятся к ортезам для ног и экзоскелеты.
Университет Йонсей, Сеул, Корея, разработал ортезы AAFO с шарниром стопы и голеностопного сустава с одной степенью свободы. Ортез изготовлен из легкого и гибкого полипропилена. Причем в стыке используется шарнирная конструкция; в приводной части используется последовательный упругий привод. Контакт между стопой и землей определяется путем установки контактного выключателя на стопе [42] и использования конечного автомата подошвенной ступни на устройстве управления ортезом голеностопного сустава. Походка делится на 6 этапов, чтобы предотвратить опускание стопы в ступенчатом ортезе и на этапе перетаскивания пальца [43].
В 2004 году доктор Х. Казеруни из Калифорнийского университета в Беркли [44] разработал экзоскелет для нижних конечностей BLEEX (экзоскелет нижних конечностей Беркли), и дизайнеры назвали его «экзоскелетом, несущим вес и не имеющим энергии». В зависимости от силы экзоскелета обратная динамическая модель экзоскелета используется в качестве контроллера прямой связи, а датчик угла сустава используется для оценки периода движения каждой ноги и управления скоординированным движением экзоскелета.Благодаря экспериментальному исследованию четырех пациентов с параплегией робот-экзоскелет может помочь пациентам достичь естественной ходьбы [45].
В 2005 году факультет машиностроения Оттавского университета [46] в Канаде разработал ортез на колено-голеностопный сустав (KAFO), чтобы помочь пользователям со слабым разгибателем улучшить походку. В этом ортезе не используется привод, он обеспечивает мощность благодаря оригинальной механической конструкции и положению пружины, а также контролирует сгибание и разгибание коленного сустава путем открытия и отключения соленоида.Система управления роботом проста и в основном использует подошвенную силу для управления двухпозиционным соленоидом и полного вспомогательного управления стоя.
Hybrid Assistive Limb (HAL) — это носимый робот для реабилитации нижних конечностей, разработанный университетом Цукуба, Япония. Первоначальная цель устройства заключалась в том, чтобы помочь пациентам с двигательной дисфункцией нижних конечностей выполнять рутинные действия, такие как ходьба, стояние, сидение, подъем и спуск по лестнице [47]. В настоящее время разработано пятое поколение продуктов — роботов, которые можно носить на всем теле, которые могут способствовать движению верхней и нижней конечностей [48].Примечательно, что некоторые клинические и экспериментальные исследования показали, что HAL может поддерживать вес пациентов и может помочь им завершить повседневную ходьбу.
2.3. Концевые эффекторы на основе ступней
Концевые эффекторы на основе ступней [49] состоят из Gait Trainer GTI, Haptic Walker и G-EO Systems.
Gait Trainer (GTI) — это подвесной робот для реабилитации походки с потерей веса, разработанный Свободным университетом Берлина, Германия. Он был основан на движении нижней конечности для упорядоченной стимуляции мышц нижней конечности и помощи пациенту в завершении тренировки походки.Однако из-за взаимодействия ножной педали и ступни пациента силовая обратная связь нижних конечностей была слабой, и ощущение ходьбы было сильнее, чем при естественной ходьбе. Кроме того, стратегия обучения походки робота делает упор на повторяющиеся пассивные движения, игнорируя при этом важность активного участия. GTI был одним из первых устройств для реабилитации нижних конечностей, и в мире было проведено множество клинических испытаний [50–54]; система значительно снижает расход физической силы, а также экономит медицинские ресурсы на реабилитацию.
В 2003 году Hesse et al. предложил концепцию Haptic Walker, основанную на технологии виртуальной реальности. Они разработали симулятор движения стопы с 6 степенями свободы с использованием потери веса в подвешенном состоянии для реализации произвольной траектории и позиционного движения в сагиттальной плоскости, таких как ходьба по неровной поверхности или лужайке, спотыкание и т. Д. В режиме управления виртуальной реальностью пациент носил шлем-дисплей, а на ножной педали был установлен датчик силы с шестью степенями свободы; пациент ощущал сцену виртуальной реальности и взаимодействовал с ней.Виртуальная сцена и музыка также могут улучшить монотонную атмосферу тренировки и повысить интерес пациентов к тренировкам для достижения цели психотерапии. Тренировочный реабилитационный робот с виртуальной ходьбой был первым устройством, которое реализовало ходьбу стопы по программируемой свободной траектории, и в качестве мер безопасности были созданы резервные схемы аварийной остановки оборудования и программного обеспечения.
По сравнению с другими спортивными платформами, в Италии робот, приводимый в движение ногой, приводится в движение педалью с движением нижней конечности.Робот добавил новый способ ходьбы, такой как препятствие, шаг и уклон. Режим расширенного обучения, а также режим активного и пассивного управления могут быть более эффективным целевым обучением [55]. Компьютер оснащен огромной системой интеграции данных, которая может отслеживать индекс реабилитации пациента в режиме реального времени. В этом роботе используется педальная конструкция, которая очень удобна и проста в использовании для пациента. Однако из-за отсутствия вспомогательных приспособлений в ногах мышечная сила пациента слишком велика или слишком слаба, чтобы ее можно было должным образом регулировать, поэтому для помощи со стороны также необходим врач [56].
2.4. Роботы с конечным эффектором на базе платформы
Роботы Ruegst для лодыжек, ARBOT и параллельных лодыжек относятся к платформе, основанной на роботах с конечным эффектором.
Первой полностью использованной роботизированной системой для реабилитации голеностопного сустава была «лодыжка Рутгерса», предложенная Girone et al. Университета Рутгерса [57]. Это была роботизированная система на базе платформы Стюарта [58] с виртуальной реальностью, обратной связью по усилию и дистанционным управлением [59]. Механизм состоял из неподвижной платформы, подвижной платформы и шести телескопических разветвленных цепей, которые были связаны с подвижной платформой.Он мог выполнять шесть независимых движений с 6 степенями свободы. Платформа Стюарта использовала шесть цилиндров двустороннего действия для управления движением с шестью степенями свободы, а интерактивная игра человека и компьютера, основанная на виртуальной реальности, предоставляемая ведущим, делает процесс обучения более не утомительным. Благодаря полученным данным врачи могли понять движение голеностопного сустава, а затем использовать сеть для контроля, оценки и направления пациентов для проведения соответствующего реабилитационного обучения.
Для сравнения: роботы-экзоскелеты обычно фиксируются в разных частях конечностей человека, создавая при этом разные силы / моменты. Однако для разных пациентов эти экзоскелетные роботы могут быть не в состоянии восстановить функцию конечностей пациента из-за своих недостатков и плохой приспособляемости. Робот с конечным эффектором обычно в определенной точке соприкасается с телом пациента. Поскольку нет ограничений на передвижение человека, конечный эффектор легче адаптировать к разным пациентам [60].
3. Режим вождения роботов для реабилитации нижних конечностей
Выбор режима вождения напрямую влияет на системную схему робота-экзоскелета, такую как конструкция конструкции и система управления, и является основой конструкции робота-экзоскелета. В настоящее время обычными режимами привода экзоскелетного робота являются гидравлический привод, моторный привод, пневматический привод и SEA (последовательный упругий привод) [61, 62]. Есть и другие режимы привода, например, пневматическая мускулатура и электронная штанга. Мы суммируем различные режимы движения в таблице 2.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||
В настоящее время в реабилитационном экзоскелетном роботе в основном используется режим моторного привода; роботу просто нужно выдерживать вес тела и помогать пациентам с гемиплегией в повседневной деятельности, например, при ходьбе и подъеме и спуске по лестнице.По сравнению с другими режимами привода режим привода от двигателя имеет множество преимуществ, таких как простота управления, отсутствие загрязнения, низкий уровень шума и т. Д. Режим гидравлического привода намного проще, меньше и легче других режимов. При одинаковой нагрузке гидравлический привод работает намного лучше, чем другие методы вождения.
Таким образом, приводы, такие как гидравлические, моторные, пневматические и SEA (серия упругих приводов) ограничены мощностью, массой и объемом, и последствия шума для людей во время работы серьезны.Хотя развитие искусственных мышц играет важную роль в решении проблем, необходимо преодолеть некоторые технические проблемы. Еще один важный аспект — проблема водителей. Полезная энергия, такая как неперезаряжаемая батарея, аккумуляторная батарея и небольшой двигатель внутреннего сгорания, имеет как достоинства, так и ограничения, поэтому потенциальный и постоянный метод решения этих проблем заключается в разработке новых технологий, таких как электрохимический топливный элемент и беспроводная передача энергии.
4.Стратегии управления для роботов-реабилитологов нижних конечностей
В соответствии с различными сигналами, полученными от инициативного намерения, стратегия управления между роботом и пациентом делится на три части: (1) Управление положением (2) Управление сигналом силы (3) Управление биологическим медицинским сигналом.
4.1. Управление положением
Метод управления положением — это управление с отслеживанием траектории, при котором нижние конечности начинают ходить в фиксированном режиме. Походка формируется пропорциональным контроллером с обратной связью по положению и углам суставов и подходит для силы мышц нижних конечностей.Хорнби подтвердил эффективность управления отслеживанием траектории, которое может увеличить скорость и долговечность пациентов с неполным повреждением спинного мозга. Zhang et al. установили контроль слежения за траекторией для модели 5 соединений, которая может расширить участие пациентов и сделать обучение более персонализированным [73].
4.2. Управление сигналом силы
В этой стратегии управления сигнал силы создается сокращением конечности и взаимодействием с механической структурой.Сила взаимодействия может быть непосредственно измерена датчиком силы и момента в элегантной механической конструкции, которая может быть оценена с помощью кинетических моделей интерактивной системы человек-компьютер. По сравнению с биологическим медицинским сигналом, сигнал силы имеет лучшую детерминированность, что может лучше отражать намерение пациента двигаться, поэтому управление, основанное на сигнале силы, возможно и относительно стабильно. Однако для получения силы взаимодействия обычно требуется механическая конструкция, которая менее доступна, чем обнаружение биологических медицинских сигналов, поэтому применимый диапазон интерактивного управления ограничен.В стратегии управления взаимодействием между реабилитационным роботом и пациентом наиболее широко используются два метода: гибридное управление силой / положением и управление импедансом [74].
4.2.1. Гибридное управление усилием / положением
Для решения проблем управления роботом в ограниченной среде [75] Райберт предложил стратегию гибридного управления усилием / положением. Иногда мы должны контролировать положение робота в определенных направлениях, но в других направлениях мы должны контролировать силу взаимодействия между механической структурой и внешним миром.Следовательно, когда робот контактирует с внешним миром, пространство задач робота будет разделено на два подпространства в стратегии гибридного управления сила / положение. Подпространства — это подпространство положения и подпространство силы, и оно завершает отслеживание управления положением и силой в соответствующем подпространстве [76]. Управление взаимодействием реабилитационного робота нижних конечностей направлено на обеспечение безопасного, удобного и гибкого места для лечения и исцеления, и для него не требуется точный контроль трассировки силы, поэтому стратегия гибридного управления усилием / положением редко используется в интерактивных элементах управления.
Компания Lokomat разработала новую стратегию совместной тренировки походки, используя гибридный метод управления силой и положением [77]. Контроль ортезов походки нижних конечностей — это двухэтапный процесс. На ступенчатом этапе, согласно динамической модели управления силой ортеза для обеспечения разумной поддержки пациентов, трудно точно оценить соответствующую кинетическую модель. Поэтому мы просто контролируем положение ортеза в положении стоя. Кроме того, этапы походки конечностей отслеживаются в режиме реального времени, как преобразование сигналов гибридного управления на двух этапах.Эта стратегия может помочь пациентам свободно ходить, и она требует активного и полного задействования конечностей пациентов. Таким образом, это активный реабилитационный тренинг, который очень целенаправлен и стимулирует пациентов к позитивному и инициативному участию в реабилитационном тренинге; это ускорит процесс восстановления.
4.2.2. Контроль импеданса
Контроль импеданса отличается от гибридного управления усилием / положением. Он направлен на реализацию гибкости реабилитационного робота, который позволяет избежать чрезмерного усилия между механической структурой и конечностями.Этот метод может обеспечить естественный, удобный и безопасный сенсорный интерфейс и эффективно избежать вторичных повреждений. Дополнительным преимуществом контроля импеданса является то, что достижение контроля импеданса не зависит от предшествующих знаний [78]. При контроле силы взаимодействия между роботом и пациентами контроль импеданса имеет более широкое применение.
В области управления роботами теория управления импедансом была впервые предложена Хоганом [79] и представляла собой распространение управления демпфированием и управления жесткостью.С точки зрения подхода к реализации, управление импедансом можно разделить на две категории: одна основана на крутящем моменте, а другая — на позиции. Первый основан на уравнениях прямого импеданса, но явные выражения уравнений импеданса обычно не существуют в управляющих структурах. Второй метод основан на уравнениях обратного импеданса, который также называется контролем проводимости. Обычно он использует типичную двойную структуру управления с обратной связью; внешний контур контролирует силу, а внутренний контур контролирует положение.Управление импедансом на основе положения проще реализовать [80, 81] сервоуправление положением, оно более зрелое и стабильное. Нацелившись на Gait Trainer (GTI) реабилитационного робота для нижних конечностей, Хусейн предложил алгоритм адаптивного управления импедансом для тренировки походки [82].
4.3. Биологический медицинский контроль сигналов
Поверхностная электромиограмма (пЭМГ) и электроэнцефалограмма (ЭЭГ) в основном используются для интерактивного управления реабилитационным роботом нижних конечностей. Поскольку оба этих сигнала используют ненавязчивые способы получения, способы получения пЭМГ и ЭЭГ являются работоспособными и не требуют медицинского эксперта, а их выполнение может быть гарантировано.
4.3.1. Контроль. Основанный на sEMG
ЭМГ-сигнал — это электрическая активность, производимая скелетными мышцами [83, 84]. Согласно различным методам измерения, он в основном состоит из пЭМГ и иЭМГ (внутримышечная ЭМГ). sEMG — это сигнал, полученный путем прикрепления электродов к поверхности кожи, а iEMG — это сигнал, полученный путем введения игольчатого электрода в мышечную ткань под кожей. По сравнению с активным сигналом пЭМГ имеет следующие преимущества: (1) Получение sEMG просто и не требует сложной конструкции механической конструкции.(2) Сигнал силы — это всего лишь воплощение всех групп мышц, и пЭМГ может отражать степень активности конкретных групп мышц, что может быть более детальным мониторингом и контролем движения конечностей. (3) На основе интерактивного управления на sEMG имеет большую гибкость, которая может реализовать контроль от здоровой конечности до больной конечности в соответствии с координацией движений тела. (4) sEMG имеет более высокую чувствительность и разрешение, чем сигнал активной силы, и он более подходит для использования пЭМГ для выявления активного двигательного намерения у пациентов с автономией нижних конечностей.
Проблемы интерактивного метода управления на основе sEMG заключаются в следующем. Во-первых, для сбора сигналов пЭМГ через кожу человека характерна большая случайность, и для получения сигналов с высоким отношением сигнал / шум, которые могут действительно отражать мышечную активность, нам необходимо найти эффективный способ отфильтровать вмешательство sEMG. Во-вторых, одноканальная пЭМГ отражает только активность конкретных мышц, чтобы получить активное двигательное намерение пациентов, что обычно необходимо для объединения нескольких мышечных активностей.Напротив, реакция сигнала силы на активное намерение более прямая.
Стратегию интерактивного управления на основе sEMG можно разделить на две категории: (1) Используя оставшуюся ЭМГ больных конечностей. Этот метод может не только стимулировать осознание пациентами активного участия, но и побуждать пациентов контролировать сокращение мышц конечностей во время упражнений. Но у серьезно парализованных пациентов их больные конечности почти полностью утратили двигательную функцию и не могут завершить сокращение мышц самостоятельно; сигнал пЭМГ настолько слаб, что его трудно обнаружить.Первая схема в данном случае неприменима. (2) Используя координацию движений левой и правой конечностей или верхних и нижних конечностей и сигналы ЭМГ здоровых конечностей, управляйте движением парализованной конечности. Этот метод с активным участием пациентов меньше, чем первая стратегия, но он обеспечивает активную программу обучения для пациентов с тяжелым параличом.
4.3.2. Контроль на основе ЭЭГ
Сигнал ЭЭГ — это электрическая активность мозга [85], которая собирается электродами, прикрепленными к коже черепа, и представляет собой колебания напряжения, вызванные потоком ионов между нейронами в головном мозге.
Самым важным преимуществом интерактивного контроля на основе ЭЭГ является то, что он ограничен степенью инвалидности; Даже если пациент полностью потерял двигательную функцию нижней конечности, до тех пор, пока мозг может производить сигналы управления движением, этот метод в равной степени применим. Этот метод особенно подходит для пациентов с полным повреждением спинного мозга, у которых функция головного мозга в норме, но путь передачи управляющего сигнала отрезан, поэтому мышцы конечностей полностью потеряли контроль.Интерактивное управление на основе ЭЭГ эквивалентно реконструкции пути передачи сигнала управления мозгом за пределы тела, а моторное и функциональное устройство электростимуляции используются в качестве исполнительного механизма для восстановления контроля над моторной функцией конечности.
Этот метод предназначен только для парализованных пациентов, у которых функция контроля моторики головного мозга в норме, но он не подходит для пациентов с повреждением головного мозга, вызванным инсультом и другими причинами, потому что зона моторной функции мозга пациентов была повреждена и не смог произвести сигнал ЭЭГ для нормального контроля движений конечностей.Во-вторых, по сравнению с сигналом пЭМГ разрешение ЭЭГ относительно намерения движения конечности низкое, а сигнал ЭЭГ имеет большую случайность, при которой изменения в выражении, настроении и внимании легко повлияют на сигнал ЭЭГ, генерируемый мозгом.
В настоящее время исследования в этой области в основном сосредоточены на знаниях о автономной классификации и регрессионном анализе; знания указали на потенциал интерактивного управления роботом для реабилитации нижних конечностей на основе ЭЭГ, но фактическое применение и экспериментальные результаты практически отсутствуют.По сравнению с офлайн-исследованием интерактивное управление в реальном времени сталкивается с более сложными проблемами. Во-первых, получение сигнала ЭЭГ в режиме реального времени невозможно для обеспечения целостности данных, используемых в автономных исследованиях; это может повлиять на точность идентификации. Во-вторых, необходимо обеспечить выполнение интерактивного управления в реальном времени, что требует использования сигнала ЭЭГ для распознавания движения, что более важно, для прогнозирования. Наконец, при интерактивном управлении в реальном времени пациент не сможет самостоятельно выполнять фактическое физическое движение, получение сигнала ЭЭГ соответствует движению мозга, и это не учитывалось при изучении существующих нижних уровней. робот реабилитации конечностей.
5. Режимы обучения реабилитационного робота для нижних конечностей
Эффективность роботов для реабилитации нижних конечностей и лечения во многом зависит от его режима обучения [86], который помогает пациенту в различных моделях движений в зависимости от выздоровления пациента [ 87]. На рисунке 1 показаны два типичных режима управления реабилитационными роботами: пассивный режим и активный режим [89]. В последнее время для реабилитации нижних конечностей были предложены более подразделенные режимы тренировок. Обзор режимов реабилитационного робота представлен в таблице 3.
| |||||||||||||||||||||||||||||||||
Реабилитационно-тренировочный режим делится на четыре вида, включая пассивный режим, режим активной помощи и активный режим. , и режим активного сопротивления.
В пассивном режиме пациент потерял мышечную силу и не смог завершить активное движение.Мы можем полагаться только на помощь внешних сил в достижении пассивного обучения пациента. Ноги робота приводят в движение ноги людей для тренировок по реабилитации, а робот для реабилитации нижних конечностей должен обеспечивать достаточную силу для пассивных тренировок. Преимущество этой модели заключается в том, что повторяющиеся упражнения способствуют восстановлению двигательной функции конечностей и уменьшают атрофию мышц, но у пациента отсутствует мотивация.
В активном режиме мышцы пациента обладают определенной силой, и активное движение с меньшим крутящим моментом может выполняться на реабилитационном оборудовании.Когда пациент хочет пошевелить суставом или конечностью, робот будет использовать внешнюю вспомогательную силу по мере необходимости. Робот должен воспринимать состояние пациента и силу / крутящий момент при отслеживании движения пациента. Эта модель может быть изменена в соответствии с намерениями пациента, что значительно повысит инициативу пациентов.
В модели активного ассистента мышцы обладают определенной силой, но без помощи ног робота пациенты не могут быть полностью обучены. Это позволяет пациенту перемещаться без помощи робота, что может улучшить его способность выполнять упражнения самостоятельно.
В модели с активным сопротивлением механическая нога обеспечивает определенную силу, противоположную направлению ноги, для достижения цели тренировки усиления мышц. Эта модель подходит для пациентов с высокой степенью восстановления, а сопротивление делает движения более сложными и может повысить мышечную силу пациентов.
В настоящее время существует ряд других тренировочных методов, таких как зеркальное движение и изотонические и изокинетические модели упражнений. Хотя эти новые модели обучения похожи с точки зрения терапевта, они также пытаются оказать помощь или сопротивление пациенту в ходе роботизированной терапии.
6. Технология обнаружения походки
Точный сигнал — основа контроля; количественная обратная связь полезна для разработки разумной стратегии реабилитации в соответствии с состоянием пациентов. Поэтому выбор датчика, который может обнаруживать информацию о взаимодействии человека с компьютером, имеет решающее значение. Технология обнаружения походки состоит из трех основных частей: технологии подошвенного зондирования, технологии определения конечностей и технологии смешанного зондирования.
Технология подошвенного зондирования: с помощью сенсора можно определять различные походки, определяя силы человека и машины или силы реакции опоры стопы.
Технология определения конечностей: в ней используются датчики для определения намерения движения нижних конечностей или туловища: (1) Технология обнаружения на основе датчика угла (2) Технология обнаружения на основе датчика EMG [96] (3) Технология обнаружения на основе BCI [97].
Технология смешанного зондирования может применяться для определения и оценки походки человека с использованием двух или более датчиков вместе.
Комбинируя информацию обнаружения всех видов датчиков, система управления может получать точную информацию о движении, чтобы гарантировать, что робот-экзоскелет будет работать эффективно и надежно.
В настоящее время существует два основных способа обнаружения намерения движения, как показано в таблице 4. Один — взаимодействие человека с роботом на основе физических моделей (pHRI) [100]. Он в основном используется для обнаружения информации о взаимодействии между пациентом и экзоскелетом, такой как информация о положении, информация о силе и т. Д. Хотя есть некоторые виды запаздывания по времени, а установка датчиков влияет на комфортность, этот метод отличается высокой надежностью. Другой — взаимодействие человека с роботом на основе познания (cHRI) [100].Используя этот метод, намерение пациента двигаться в качестве входных сигналов для контроллера получается посредством идентификации сигналов ЭМГ [96]. Накладывать датчики непосредственно на кожу очень удобно, но пот на коже может серьезно повлиять на точность измерения, а также не может обеспечить взаимно однозначное сопоставление между сигналами ЭМГ и крутящим моментом сустава. В то же время ошибочные суждения контролера могут нанести вторичный ущерб. Очевидно, что мы можем точно судить о намерении движения, объединив два вида сигналов.Метод обнаружения информации о взаимодействии человека с роботом представлен в таблице 4.
| ||||||||||||||||||
Робот для восстановления экзоскелета использует множество типов датчиков для обнаружения походки, но методы обнаружения по-прежнему имеют много проблем, таких как уязвимость к помехам, неточное суждение и плохая адаптируемость.Следовательно, развитие технологии BCI и сенсорной техники имеет решающее значение для решения текущих проблем.
7. Обсуждение
В этой статье рассматривается разработка робота для реабилитации нижних конечностей, режим обучения, режим вождения, стратегия управления и технология определения походки. Робот для реабилитации нижних конечностей имеет множество преимуществ, он показал обнадеживающие клинические результаты и эффективность реабилитации. Хотя большинство роботов для реабилитации нижних конечностей могут обеспечить систематическое и долгосрочное лечение, все же есть некоторые недостатки и недостатки, которые резюмируются следующим образом: (1) Механическая конструкция и система управления реабилитационного робота нуждаются в улучшении.Во время реабилитационного обучения ему не хватает точного контроля в реальном времени углов суставов пациента, крутящего момента, скорости и т. Д. (2) Роботы, недавно разработанные в стране и за рубежом, в основном работают на жестком двигателе. Системе не хватает гибкости, а конструкция привода реабилитационного робота слишком сложна и велика с низкой портативностью. В то же время безопасность и комфорт также нуждаются в дальнейшем улучшении. (3) Должен быть доведен до конца механизм обратной связи реабилитационного эффекта. Он не может дать точную информацию о положении и силе конечностей во время реабилитационной тренировки, что приводит к низкой эффективности тренировки и напрямую влияет на оценку реабилитационной тренировки.(4) Для гибкого робота нам необходимо разработать более совершенный высокополимер в качестве гибкого материала. Более того, движущая сила все еще нуждается в улучшении. (5) Мотивация пациентов, участвующих в обучении, играет очень важную роль в реабилитации после инсульта. Однако большинство парадигм обучения жесткие и скучные. Целенаправленная парадигма обучения с интересными играми, такими как ударь крота, может сделать тренировку более увлекательной. (6) Робот для реабилитации нижних конечностей по-прежнему сталкивается с многочисленными технологическими проблемами, включая биомеханику, нейрофизиологию, взаимодействие человека с компьютером (HCI). , и эргономика.
Современные роботы для реабилитации нижних конечностей в некоторой степени могут обеспечить простую программу обучения для пациентов и оказывают определенное влияние на реабилитацию. По нашему мнению, дальнейшие исследования роботов для реабилитации нижних конечностей должны сосредоточиться на следующих аспектах: (1) Системный дизайн робота для реабилитации нижних конечностей: конструкция механической конструкции является основой роботизированной системы, которая должна достигать некоторых основных целей, таких как компактность, мульти-степень свободы, большая гибкость, различные виды тренировочных методов и движений, лучший комфорт и высокое соответствие между человеком и компьютером.(2) Стратегии управления и конструкция движений реабилитационного робота для нижних конечностей: из-за индивидуальных различий пациентов робот должен воспринимать информацию о состоянии силы и положения пациента, чтобы принять соответствующий режим обучения и стратегию управления. Требуются дальнейшие исследования, такие как адаптивность и стабильность системы управления, применение сенсорной техники и разработка алгоритма управления. Следовательно, робот должен не только соответствовать требованиям к малому весу, быстрому отклику и большому выходному крутящему моменту, но также иметь некоторые характеристики, аналогичные мышцам скелета животных, такие как гибкость и надежность.Поэтому важно исследовать метод оптимизации проектирования для энергосбережения, основанный на активном и пассивном режиме, энергетической технологии с высокой плотностью энергии и технологии беспроводной передачи. (3) Конструкция системы обнаружения походки: реабилитационный робот для нижних конечностей. должен уметь обнаруживать и воспринимать информацию о силах взаимодействия и положении движения между пациентом и реабилитационным роботом. С одной стороны, робот должен оказывать соответствующую помощь, когда пациент не может самостоятельно выполнять движения.С другой стороны, робот должен уменьшать вспомогательную силу или должным образом увеличивать сопротивление, когда двигательная способность парализованной нижней конечности значительно улучшается. (4) Механизм защиты: робот должен быть спроектирован таким образом, чтобы соответствовать требованиям безопасности клинической реабилитации. , предотвращая при этом повреждение. Для обеспечения безопасности реабилитационного обучения при проектировании реабилитационных роботов для нижних конечностей следует учитывать два важных вопроса: конструкция механизма (аппаратное обеспечение) и система управления (программное обеспечение).(5) Система оценки реабилитационного эффекта: путем комбинирования обнаружения сигналов ЭМГ и сигналов ЭЭГ. Мы должны изучить внутреннюю взаимосвязь между эффективностью реабилитации и параметрами поезда и разработать новые стратегии оценки, чтобы проверить эффективность реабилитационного робота для нижних конечностей. (6) Технология виртуальной реальности доказала свою эффективность в нейрореабилитации. С одной стороны, интересная и разнообразная виртуальная сцена в VR улучшает мотивацию пациентов по сравнению с курсом обучения при традиционном обучении.С другой стороны, иммерсивная среда VR может эффективно стимулировать зеркальные нейроны головного мозга человека в моторной коре и способствовать восстановлению нерва. Однако VR не может обеспечить физическую обратную связь с парализованной конечностью; робот может компенсировать этот недостаток. Таким образом, сочетание реабилитационного робота и технологии виртуальной реальности — это будущее направление развития. Однако перед подачей заявки необходимо решить следующие основные проблемы: (i) Точные факторы в дизайне VR, которые стимулируют зеркальные нейроны моторной коры головного мозга пациентов, должны быть изучены в будущем.(ii) Проблема головокружения VR, которая ограничивает применение системы VR, должна быть решена.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов относительно публикации данной статьи.
Вклад авторов
Сюэ Чжан и Зан Юэ внесли равный вклад в эту статью.
Благодарности
Это исследование было поддержано Проектом Китайского фонда постдокторантуры (2014M552431) и фондами фундаментальных исследований для центральных университетов.
мышечная система человека | Функции, схемы и факты
Следующие разделы предоставляют базовую основу для понимания общей мышечной анатомии человека с описанием больших групп мышц и их действий. Различные группы мышц работают согласованно, чтобы контролировать движения человеческого тела.
Шея
Движение шеи описывается в терминах вращения, сгибания, разгибания и бокового изгиба (т. Е. Движения, используемого для прикосновения уха к плечу).Направление действия может быть ипсилатеральным, что относится к движению в направлении сокращающейся мышцы, или контралатеральным, что относится к движению в сторону от стороны сокращающейся мышцы.
мышцы шеи; мышечная система человекаМышцы шеи.
Encyclopædia Britannica, Inc. Получите эксклюзивный доступ к контенту из нашего 1768 First Edition с подпиской. Подпишитесь сегодняВращение — одно из важнейших действий шейного (шейного) отдела позвоночника.Вращение в основном осуществляется грудинно-ключично-сосцевидной мышцей, которая сгибает шею в ипсилатеральную сторону и вращает шею в противоположную сторону. Вместе грудинно-ключично-сосцевидные мышцы по обеим сторонам шеи сгибают шею и поднимают грудину, помогая при принудительном вдохе. Передняя и средняя лестничные мышцы, которые также расположены по бокам шеи, действуют ипсилатерально, поворачивая шею, а также поднимая первое ребро. Сплениус головы и шейный позвонок, расположенные в задней части шеи, вращают голову.
Боковое сгибание также является важным действием шейного отдела позвоночника. В сгибание шейной стороны вовлекаются грудинно-ключично-сосцевидные мышцы. Задние лестничные мышцы, расположенные на нижних сторонах шеи, ипсилатерально сгибают шею в сторону и приподнимают второе ребро. Сплениус головы и шейный позвонок также помогают при сгибании шеи в стороны. Мышцы, выпрямляющие позвоночник (подвздошно-костная, длинная и спинальная) — это большие глубокие мышцы, которые увеличивают длину спины. Все три действуют для ипсилатерального изгиба шеи.
Сгибание шеи относится к движению, используемому для прикосновения подбородка к груди. Это достигается в первую очередь грудинно-ключично-сосцевидными мышцами при помощи длинных коленных и длинных мышц головы, которые находятся в передней части шеи. Разгибание шеи противоположно сгибанию и выполняется многими из тех же мышц, которые используются для других движений шеи, включая шейную мышцу шеи, звездочную мышцу головы, подвздошно-костную, длинную и спинную мышцы.
Спина
Послушайте, как врач объяснит причины и методы лечения боли в спине, называемой лордозомУзнайте о причинах и способах лечения боли в спине.
Contunico © ZDF Enterprises GmbH, Майнц Просмотреть все видео по этой статьеСпина является источником многих мышц, которые участвуют в движении шеи и плеч. Кроме того, осевой скелет, который проходит через спину вертикально, защищает спинной мозг, который иннервирует почти все мышцы тела.
мышцы спины; мышечная система человекаМышцы спины.
Encyclopædia Britannica, Inc.Множественные мышцы спины работают именно при движениях спины.Например, мышцы, выпрямляющие позвоночник, разгибают спину (сгибают ее назад) и сгибают спину в стороны. Мышцы semispinalis dorsi и semispinalis capitis также расширяют спину. Маленькие мышцы позвонков (мультифиди и ротаторы) помогают вращать, разгибать и сгибать спину в стороны. Мышца квадратной мышцы поясницы в нижней части спины сгибает поясничный отдел позвоночника и помогает вдыхать воздух благодаря своим стабилизирующим воздействиям в месте прикрепления к 12-му ребру (последнему из плавающих ребер). Лопатка (лопатка) поднимается трапециевидной мышцей, которая проходит от задней части шеи до середины спины, большими и малыми ромбовидными мышцами в верхней части спины и мышцей, поднимающей лопатку, которая проходит по бокам и сзади шеи.
Регенерация: чему аксолотли могут научить нас в отношении отрастания человеческих конечностей
от Garrett Dunlap
фигурки от Rebecca Senft
Только в Соединенных Штатах от потери конечностей страдают почти 2 миллиона человек. Хотя многие случаи связаны с травматическими событиями, такими как автомобильные аварии, большинство случаев потери конечностей вызвано заболеваниями, поражающими кровеносные сосуды тела. Одним из таких заболеваний является диабет, при котором постепенное снижение притока крови к нижним конечностям пациента может в конечном итоге привести к потере всей конечности.Если заболеваемость диабетом продолжит расти, вероятно, будет соответствующее увеличение числа людей, которым придется столкнуться с ампутацией конечности. К сожалению, нынешние терапевтические возможности после ампутации не сильно изменились по сравнению с столетиями назад, и протезы конечностей остаются единственным вариантом замены. Но хотя замененные протезы смогли заменить форму потерянной конечности, их функция остается крайне недостаточной, особенно когда утраченный придаток представляет собой целую руку или ногу.Так что, если вместо того, чтобы полагаться на деревянного или металлического самозванца, однажды мы просто отрастим потерянную конечность?
Многие животные обладают способностью к регенерации
Чтобы задуматься о том, как осуществить регенерацию конечностей человека, ученые обратили внимание на животных, которые уже демонстрируют эту способность. Ярким примером является аксолотль ( Ambystoma mexicanum ), вид водных саламандр. В отличие от людей, он обладает «сверхспособностью» регенерировать свои конечности, спинной мозг, сердце и другие органы.Но аксолотль — не единственный представитель животного мира, который может это делать ( Рис. 1 ), так как многие беспозвоночные (животные без позвоночника) — мастера регенерации. Например, плоские черви и гидра могут вырастить все свое тело только из крошечной части своего изначального «я». Даже среди позвоночных (животных, у которых есть шипы) аксолотль — не единственное животное, способное к регенерации. Известно, что молодые лягушки отращивают конечности, но теряют эту способность, когда превращаются из головастиков во взрослых лягушек.С другой стороны, аксолотль сохраняет его на протяжении всей своей жизни, что делает его уникальным среди позвоночных и отличной моделью для изучения в исследованиях регенерации.
Рис. 1 : Многие животные проходят регенерацию (по крайней мере, до некоторой степени). Хотя аксолотль не единственный хозяин регенерации в животном царстве, это единственное позвоночное животное, которое может регенерировать многие части тела на протяжении всей своей жизни.Хотя не существует известных млекопитающих, которые могут полностью регенерировать отсутствующие придатки, многие из них, включая людей, обладают намеками на регенеративный потенциал.Было замечено, что мыши могут регенерировать кончики пальцев ног, хотя потеря на ступне приводит к тем же рубцам, что и люди после ампутации. Известно также, что люди регенерируют кончики пальцев, включая кости и кожу. Многочисленные клинические отчеты за последние десятилетия документально зафиксировали такие случаи после травм. К сожалению, эта реакция ослабевает по мере того, как место потери находится ближе к ладони. Хотя эта способность, несомненно, помогла некоторым людям в случае травмы, она очень далека от способности аксолотля регенерировать полностью сформированную конечность со всеми ее нормальными мышцами, хрящами и другими тканями.
Как работает регенерация?
У аксолотлей процесс, который приводит к регенерации всей конечности ( Рис. 2 ), включает сложную оркестровку выживших клеток конечности. После потери конечности ( B ) сгусток клеток крови быстро останавливает кровотечение в месте разреза. После этого слой клеток работает, чтобы быстро покрыть плоскость ампутации, образуя структуру, называемую эпидермисом раны ( C ).В течение следующих нескольких дней клетки эпидермиса раны быстро растут и делятся. Вскоре после этого клетки под эпидермисом также начинают быстро делиться, образуя конусовидную структуру, известную как бластема ( D ). Считается, что клетки, из которых состоит бластема, являются костными, хрящевыми, мышечными или другими клетками, которые де-дифференцируются (теряют свою идентичность), чтобы стать похожими на стволовые клетки, которые могут стать одним из многих различных типов клеток. Клетки бластемы, однако, имеют ограничения на типы клеток, которыми они могут стать: например, клетка бластемы, которая раньше была мышечной клеткой, может только переформировать различные типы мышечных клеток, но не клетки кожи или хряща.Эти недифференцированные клетки бластемы затем растут и размножаются, в конечном итоге восстанавливая свою идентичность как полностью развитые клетки кости или кожи ( E ). По мере того как бластема и ее клетки продолжают делиться, растущая структура становится плоской и в конечном итоге становится похожей на идеальную копию потерянной конечности, включая нервы и кровеносные сосуды, которые связаны с остальной частью тела ( F ).
Рисунок 2 : После травмы конечности аксолотля проходят многоступенчатый процесс восстановления утраченного придатка . Кожу, кости, хрящи и мышцы можно отрастать много раз без каких-либо признаков травмы.Учимся у аксолотля
Чтобы даже задуматься о том, как однажды мы сможем отрастить потерянные человеческие конечности, ученые должны хорошо ознакомиться с изменениями, которые претерпевают клетки аксолотлей во время регенерации. Один из подходов, который до сих пор был успешным, — это обнаружение молекулярных изменений, которые заставляют аксолотль терять свою регенеративную способность, что может выявить наиболее важные компоненты и факторы регенерации.Например, было обнаружено, что иммунная система играет важную роль в процессе регенерации конечностей. Макрофаги, представляющие собой клетки, которые играют важную роль в воспалительной реакции после травмы, ранее были связаны с регенерацией. Фактически, введение лекарства для избавления от макрофагов в конечности аксолотля перед ампутацией приводит к накоплению рубцовой ткани вместо повторного роста. Это рубцевание, возникающее при нарушении функции белка, называемого коллагеном, является нормальным явлением при заживлении ран у людей, но необычно для аксолотлей.Этот результат предполагает, что макрофаги могут быть необходимы для регенерации. Также было показано, что настройка нервной системы мешает регенерации. Ученые заметили, что хирургическое удаление нервов конечности перед ампутацией может препятствовать регенерации, хотя работа еще не завершена, чтобы лучше понять, почему это происходит.
Однако все эти предыдущие методы основаны на необходимости удаления важной в остальном части здорового тела (например, иммунных клеток и частей нервной системы).Но сейчас ученые опускаются до уровня генов в поисках новых идей. Для этого исследователи сначала попытались ответить на вопрос, сколько раз конечность аксолотля может успешно регенерировать. После неоднократной ампутации конечностей было замечено, что к пятому разу несколько конечностей смогли восстановить свой прежний потенциал. Кроме того, когда конечности, которые не могли регенерироваться, были дополнительно изучены, исследователи снова обнаружили обширное образование рубцовой ткани, аналогичное тому, что часто наблюдается при травмах человека.Сравнивая гены, которые были включены или выключены, когда конечность аксолотля не могла вырасти заново, ученые обнаружили для изучения больше молекул и процессов, которые обещают запустить регенерацию у людей. Возможно, однажды появятся лекарства, которые модулируют эти гены, заставляя их включаться и помогать человеческой конечности вырасти заново после ампутации.
Взгляд в будущее
Хотя мы все еще далеки от того, чтобы отрастить человеческую конечность, мы ставим себя в невыгодное положение, если не понимаем, как происходит регенерация у счастливых животных, которые уже обладают этой «сверхспособностью».«С помощью инструментов, которые позволяют ученым видеть тонкие генетические детали процесса регенерации, мы постепенно приближаемся к пониманию того, что заставляет регенерацию работать. Чтобы проверить это, ученые усердно работают над разработкой новых инструментов, которые позволят им идентифицировать другие цели и начать передавать эти знания млекопитающим, таким как мыши, а это означает, что, возможно, однажды у миллионов людей, живущих с потерянными конечностями, появится новый путь лечения: регенерация.
Гарретт Данлэп — студент, кандидат биологических и биомедицинских наук.Программа D. в Гарвардском университете.
Для получения дополнительной информации:
Строение скелета человека
Скелет состоит из костей и составляет основу, которая поддерживает более мягкие части человеческого организма. Позвоночник или позвоночник служит опорой для тела. Он состоит из тридцати трех-тридцати четырех суставов или позвонков. У мужчины семь шейных позвонков, двенадцать спинных и пять поясничных. Кроме того, существуют ложные позвонки, состоящие из пяти крестцовых (объединенных в одну кость, os sacrum ) и четырех или пяти копчиковых или хвостовых позвонков.Крестец составляет основу позвоночного столба.
В каждом позвонке между телом (то есть утолщенной передней частью) и отростками имеется отверстие или отверстие. Эти отверстия соответствуют друг другу через все позвонки, образуя длинную костную трубу или канал, который содержит спинной мозг или спинной мозг. Вещество ( фибро-хрящ ) образует своего рода перегородку межпозвоночных дисков между позвонками, объединяя их и придавая позвоночнику определенную степень гибкости.Позвонки и их отростки представляют собой крепления для ряда мышц и связок, а также проходы для кровеносных сосудов и нервов, выходящих из позвоночника. Двенадцать пар эластичных ребер отходят наружу и вперед от позвоночника, образуя каркас грудной клетки, который защищает сердце, легкие и другие внутренние органы. В верхней части спины расположены две треугольные кости, лопатки или лопатки. Каждая лопатка связана с ключицей или ключицей, которая на другом конце соединяется с грудиной (грудиной).Лопатки и ключицы образуют своего рода дугу, охватывающую верхнюю часть груди, грудной пояс, к которому прикрепляются верхние конечности. Дуга нижних конечностей — это тазовый пояс.
Череп, или черепная коробка, представляет собой костную оболочку, которая образует каркас головы и охватывает мозг. Он состоит из восьми костей: лобной и затылочной костей передней и задней части; две височные и теменные кости, образующие виски и боковые стороны черепа; клиновидная кость основания черепа; и решетчатая кость в верхней части корня носа, через которую проходят обонятельные нервы.
7. ,.
1. Скелет состоит из костей и составляет (), который поддерживает () человеческое тело.
2. () или позвоночник служит опорой для тела.
3. У мужчины () семь шейных позвонков, двенадцать (), пять ().
4. В каждом позвонке между телом и отростками имеется () или отверстие.
5. Позвонки и их отростки обеспечивают () для ряда мышц и ().
6. На верхней части спины две плоские (), лопатки или ().
7. Дуга нижних конечностей ().
8. Череп или череп — это (), который образует каркас головы и () мозг.
8. . .
— 33 34;
-;
-;
-;
-,;
-;
-;
-;
-;
-.
9. Строение скелета человека.
1. Из чего состоит скелет?
2. Какова функция позвоночника?
3. Состоит ли позвоночник из одной удлиненной кости или нескольких независимых костей?
4. Какие независимые кости неправильной формы, составляющие позвоночник, называются?
5. Сколько позвонков у человека? (укажите названия и количество различных позвонков)
6.Каковы основные части типичного позвонка? (тело, процессы)
7. Что такое отверстие?
8. Позвоночные отверстия расположены одно над другим, не так ли?
9. Что находится в канале, образованном отверстиями позвонков?
10. Какие позвонки соединяют друг с другом?
11. Позвонки представляют собой области для прикрепления мышц и проходы для кровеносных сосудов и нервов, не так ли?
12.Как мы называем эластичные дуги кости, которые сзади связаны с позвоночником и образуют большую часть скелета грудной клетки?
13. Сколько ребер на каждой стороне?
14. Какие внутренние органы защищают ребра?
15. Какие кости образуют плечевой или грудной пояс?
16. К какому поясу прикрепляются нижние конечности?
17. Как называется скелет головы?
18.Назовите названия костей, составляющих череп.
Текст: Сундук
Грамматика: соединений.
1.
,,. .Ch est, tr u nk, br ea st, p ar t, w i de, r oo t, bel ow , pl a te, m o ve, th ick, upp er , ar m, f ur ther, benea th , s ide, r igh t, d ow n, v ei n, lu ng , поверхность s , ne ck .
: 2015-12-16 | : 1538 |
Визуальное руководство по вскрытию человека | Мультимедийные средства обучения
Медицинская школа при Медицинском колледже Джефферсона начинается с 12-недельного курса под названием «Форма и развитие человека», который состоит из лекций по анатомии человека и эмбриологии и лаборатории анатомии человека. Поскольку в течение первой недели анатомической лаборатории необходимо идентифицировать чуть менее 200 структур, адаптация к медицинскому институту может быть ошеломляющей.Студенты Джефферсона, работая с научным руководителем факультета и специалистами по средствам массовой информации и преподавания AISR, создали серию анатомических видеороликов в качестве вспомогательного образовательного ресурса, чтобы помочь студентам изучить анатомию. Разделы заполнялись каждый год, начиная с 2005 года, в рамках летней программы стипендий Джефферсона по компьютерам, спонсируемой деканом медицинского колледжа Джефферсона. Это текущая программа; дополнительные видео будут сняты в последующие годы, пока не будет завершена серия вскрытия.В число консультантов входят Ричард Р. Шмидт, доктор философии, Департамент патологии, анатомии и клеточной биологии, и Энтони Дж. Фрисби, доктор философии, директор образовательных услуг AISR.
Брюшная полость: левая почка [структура почки, вид сзади], Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Верхняя конечность: ладонная рука — поверхностные структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: ладонная рука — тенар, Юлия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: ладонная рука — локтевая артерия и ветви, Джулия Герман, Ромео Вильдо Лароя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: ладонь — локтевой нерв и ветви, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Промежность: поперечный разрез стержня полового члена, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Промежность: Пенис, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Промежность: анатомия пениса, Джулия Герман, Ромео Вильдо Лароя II, Бенджамин Лихти и Майкл Савино
Промежность: анатомия поверхности и разрезы кожи, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Промежность: семенной канатик, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Промежность: семенники, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Живот: передняя кишка — живот, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Нижняя конечность: передний отдел глубокого рассечения ноги, Александр Бадиавас и Габриэль Феррейра
Нижняя конечность: передний отдел поверхностной диссекции ноги, Александр Бадиавас и Габриэль Феррейра
Нога: тыльная и поверхностная диссекция, Александр Бадиавас и Габриэль Феррейра
Ступня: глубокая рассечение спины, Александр Бадиавас и Габриэль Феррейра
Руководитель: поверхностное вскрытие, Александр Бадиавас и Габриэль Феррейра
Голова: Falx Cerebri и черепная ямка, Александр Бадиавас и Габриэль Феррейра
Таз: тазобедренный сустав, Александр Бадиавас и Габриэль Феррейра
Голова: удалена подвисочная ямка-скуловая дуга, Александр Бадиавас и Габриэль Феррейра
Нижняя конечность: коленный сустав: переднебоковой вид, Александр Бадиавас и Габриэль Феррейра
Нижняя конечность: глубокая диссекция бокового отдела, Александр Бадиавас и Габриэль Феррейра
Брюшная полость: Селезенка и связанные с ней структуры, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Нижняя конечность: Поверхностная нога: боковая (фасция бедра удалена), Александр Бадиавас и Габриэль Феррейра
Глава: Ротовая полость, Александр Бадиавас и Габриэль Феррейра
Голова: параназальные пазухи — носовая перегородка, Александр Бадиавас и Габриэль Феррейра
Нижняя конечность: подошвенный аспект глубокого рассечения стопы, Александр Бадиавас и Габриэль Феррейра
Нижняя конечность: подошвенная (поверхностное рассечение), Александр Бадиавас и Габриэль Феррейра
Нижняя конечность: задний отсек (глубокая диссекция), Александр Бадиавас и Габриэль Феррейра
Нижняя конечность: задний отсек (поверхностная диссекция), Александр Бадиавас и Габриэль Феррейра
Верхняя конечность: тыльная сторона кисти — анатомическая табакерка, Юлия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: плечевое сплетение и связанные ветви, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: передняя рука и предплечье — кожные нервы, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Брюшная полость: задняя стенка — обзор, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Живот: брюшная полость — малый сальник, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Брюшная полость: передняя кишка — поджелудочная железа, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Живот: нервы задней брюшной стенки, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Живот: Мускулатура, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Живот: двенадцатиперстная кишка, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Брюшная полость: Средняя кишка — верхняя брыжеечная артерия, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Живот: почки и надпочечники in situ, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Брюшко: Хвостовое / ростральное, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Живот: паховая область, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Брюшная полость: Правый надпочечник (надпочечная) и связанная с ней сосудистая сеть, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Живот: разрезы кожи живота, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Живот: задняя кишка — нижняя брыжеечная артерия, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Живот: удаление брыжейки, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Живот: задняя стенка — мышцы и связанные с ними структуры, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Брюшная полость: анатомия поверхности, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Брюшко: Передняя кишка — сосудистая сеть, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Брюшная полость: задняя стенка — притоки нижней полой вены, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Брюшко: Обзор внутренних органов, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Ягодичная и задняя часть бедра: анатомия поверхности, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Ягодичные и задняя часть бедра: разрезы кожи, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Кожная передняя часть бедра, Джулия Герман, Ромео Вильдо Лароя II, Бенджамин Лихти и Майкл Савино
Нижняя конечность: задняя часть бедра, кожная, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Нижняя конечность: задняя часть бедра, подколенная ямка, Джулия Герман, Ромео Вильдо Лароя II, Бенджамин Лихти и Майкл Савино
Нижняя конечность: передняя часть бедра, Юлия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Нижняя конечность: задняя часть бедра, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Таз: костная структура — полный таз, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Таз: структура костей — половина таза, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Таз: передняя брюшная стенка, Юлия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Таз: Мочевой пузырь, Юлия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Таз: Артерии, Юлия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Таз: Мышцы тазового дна, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Таз: Ямки, Джулия Герман, Ромео Вильдо Лароя II, Бенджамин Лихти и Майкл Савино
Таз: Нервы, Джулия Герман, Ромео Вильдо Лароя II, Бенджамин Лихти и Майкл Савино
Таз: Висцера, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: передняя часть шеи — превертебральные мышцы и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: передняя часть шеи — поверхностные нервы и сосуды, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: Передний треугольник шеи — границы и подтреугольники, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: передняя часть шеи — грудной проток и связанные с ним структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея; Передняя часть шеи — щитовидная железа и связанные с ней структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: передняя часть шеи — наружная сонная артерия и ветви, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: передние шейные нервы и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Гриф: Атлас и связанные с ним структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: Основание головы и связанные с ней структуры, Джулия Герман, Ромео Вильдо Лароя II, Бенджамин Лиечи и Майкл Савино
Шея; Подъязычная область — мышцы и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: надподъязычная область — мышцы и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: задняя гортань и связанные с ней структуры, Юлия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: Внутренняя гортань и связанные с ней структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: глотка и связанные с ней мышцы, Джулия Герман, Ромео Вильдо Лароя, Герман Лихти и Майкл Савино
Шея: глотка — сокращающие мышцы, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лейхти и Майкл Савино
Шея: Задний треугольник границ шеи, Юлия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: Задний треугольник шеи — поверхностные нервы, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Шея: Симпатический ствол, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: передняя часть руки — мышцы и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: передний отдел руки и рукава — артерии и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: передняя рука — глубокие вены, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: задняя рука — кожные нервы, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: задняя рука — поверхностные мышцы и локтевой нерв, Юлия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: задняя рука — мышцы и глубокие структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: задняя рука — сосуды глубокого плеча и лучевой нерв, Юлия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: передняя рука — поверхностные вены, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: подмышечная артерия и связанные с ней ветви, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: дельтовидный треугольник и связанные с ним структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: подмышечные впадины и связанные с ними мышцы, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: грудные мышцы и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: плечевое сплетение — связки и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: плечевое сплетение — подразделения, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: плечевое сплетение — корни и связанные ветви, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: плечевое сплетение — терминальные нервы, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: плечевое сплетение — стволы и связанные ветви, Юлия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: тыльная лопатка — четырехугольное пространство, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: тыльная сторона кисти — лучевая артерия и ветви, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: тыльная сторона кисти — поверхностные структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: тыльная лопатка и связанные с ней мышцы, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: тыльная лопатка — надлопаточный нерв и артерия, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: тыльная часть лопатки — треугольное пространство, Джулия Герман, Ромео Вильдо Лароя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: передняя часть предплечья — мышцы поверхностного слоя и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Брюшная полость: задняя брюшная стенка — ветви брюшной аорты, Моисей Матур, Гаэтан Сгро и Нишант Вайдьянатан
Верхняя конечность: передняя часть предплечья — промежуточные и глубокие слои l, мышцы и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: передняя часть предплечья — промежуточные и глубокие слои II, мышцы и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: задняя часть предплечья — глубокий слой, мышцы и связанные с ними структуры, Джулия Герман, Ромео Вильдо Лароя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: задняя часть предплечья — поверхностный слой, мышцы и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: плечевой сустав и связанные с ним структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: ладонная рука — глубокие мышцы и связанные с ними структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: ладонная рука — канал Гийона и связанные с ним структуры, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: ладонная рука — гипотенарный отсек, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: ладонная кисть — червеобразные и сухожилия сгибателей, Юлия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Верхняя конечность: ладонная рука — срединный нерв и ветви, Джулия Герман, Ромео Вильдо Ларойя II, Бенджамин Лихти и Майкл Савино
Грудная клетка: передняя грудная стенка, Майкл Троттер и Свати Виджаярагхаван
Верхние конечности: Рука, Майкл Троттер и Свати Виджаярагхаван
Спина: Глубокая спина, Майкл Троттер и Свати Виджаярагхаван
Торакс: Сердце, Майкл Троттер и Свати Виджаярагхаван
Торакс: Медиастина, Майкл Троттер и Свати Виджаярагхаван
Спина: Подзатылочный треугольник, Майкл Троттер и Свати Виджаярагхаван
Спина: Поверхностная спина, Майкл Троттер и Свати Виджаярагхаван
Грудная клетка: положение грудной клетки и легкие, Майкл Троттер и Свати Виджаярагхаван
.