техника выполнения, какие мышцы работают
Сведение рук в тренажере «бабочка» призвано изолировать пекторальные мышцы. Грудные работают и в других упражнениях, например, во всех жимах, отжиманиях, и сведениях рук перед собой. Но в бодибилдинге ценится точечная проработка, позволяющая мышцам приобрести тот самый наполненный и объемный вид, к которому все стремятся. Выраженные грудные – это сочетание жимовых движений с изолирующими. Работа в тренажере позволяет заниматься всем, от новичков, до атлетов высокого уровня. Она безопасна, и при правильном построении тренировочного плана, эффективна. Сведение позволяет избежать работы во вредной для плечевого сустава плоскости, подходит для реабилитации после травм.
Техника выполнения
Настройка тренажера:
- Сиденье нужно установить так, чтобы спортсмен мог сводить руки перед грудью, выражаясь анатомически верно, приводить плечо к средней линии тела. Его предплечья должны быть в одной плоскости с проекцией плечевого сустава;
- Спинка должна быть горизонтальна, наклон нужно убрать, если он есть;
- Если нет возможности прижаться к спинке тренажера из-за длины рук, стоит взяться не за рукоятки, а чуть выше или ниже, но лопатки касаются спинки в любом случае;
- Стартовое положение ручек – анатомическая нейтраль, то есть то положение, откуда мы стартуем с разведенными в сторону руками, параллельными полу;
- Если есть стаж в бодибилдинге, нормально работают суставы, и нет проблем со спиной, можно убрать ручки чуть назад так, чтобы в негативной фазе чувствовалось большее растяжение мышц.
 Новичкам этот вариант не рекомендуется;
Новичкам этот вариант не рекомендуется; - Высота сиденья подбирается так, чтобы стопы касались пола, и был хороший упор ногами. Если его нет, стоит подложить под стопы блоки или блины
Исходное положение – нужно сесть на сиденье тренажера, упереться ногами в пол, и взять ручки тренажера свободным хватом. Далее плечи отводятся от ушей, лопатки прижимаются к позвоночнику, и опускаются к тазу. Прогиб поясницы нужно сохранить естественным.
Движение:
- Рукоятки тренажера сводим к центру тела, за счет сокращения мышц груди;
- Смещение хвата вверх переносит акцент к верхнему пучку пекторальных мышц, опускание – к низу груди, но акценты незначительны;
- Разведение производится мягко, руки отводятся в стороны плавно, без рывков;
- Движение лучше сводить и разводить на два счета, не делая рывков;
- Все повторения выполняются без пауз, единым подходом, отдых между сетами 1-2 минуты
Важно:
- Нужно следить, чтобы плечи не поднимались вверх к ушам и в движении не задействовались трапециевидные мышцы;
- Обратный прогиб в грудном отделе позвоночника нужно исключить, круглая спина – причина травм;
- Копчик должен быть в нейтральном положении, его не нужно «толкать» вверх, и тянуться им к нижним ребрам;
- Ноги упираются в пол умеренно, «подталкивать» тело с каждым повторением вверх не стоит;
- Пресс нужно подтянуть и чуть собрать, живот не вываливается;
- Не нужно делать движения рывками, толкать ручки к средней линии тела за счет инерции, и отрывать лопатки от спинки тренажера;
- Новички и тренирующиеся для фитнеса не должны отводить руки за среднюю линию тела.
 Это может быть причиной травм плеча;
Это может быть причиной травм плеча; - Это изолированное упражнение, необходимо соизмерять свои возможности относительно веса отягощения. Лучше использовать небольшие веса, но прорабатывать мышцы тщательно, не толкая тренажер по инерции, а сводя руки и напрягая грудные
Важно: если человек не чувствует, как нужно напрягать грудные во время сведения, ему можно попробовать сведение с легкими гантелями лежа на прямой скамье. Это движение учит сводить руки к центру без дополнительных инерционных движений, и работы плеч.
Варианты упражнения
Вопреки распространенному мнению, разведение рук в тренажере «пек-дек» или «бабочка» прорабатывает не грудь, а задний пучок дельтовидной мышцы. Вариантом этого упражнения его считать нельзя.
Если в зале нет пек-дека, следует:
- Сводить руки с легкими гантелями, лежа на прямой или чуть наклоненной скамье;
- Сводить перед собой рукоятки кроссовера, прикрепленные к верхнему блоку;
- Делать сведение перед собой в петлях TRX
Техническая особенность у всех «сводящих» движений одна – руки двигаются в средней линии, перед грудью, нельзя «задирать» их к голове, или опускать к животу.
Вариантом движения служит работа в пек-дек с упорами. Есть вариант тренажера с мягкими упорами для предплечий. Он обеспечивает сведение по сокращенной амплитуде, разгружая локтевой сустав. Техника полностью повторяет работу в классическом пек-деке с ручками. Преимущество этого тренажера – возможность выполнять «добивку» после тяжелых жимов.
Разведение рук в пек-дек не является компенсирующим к сведению, выполнять его имеет смысл не в тренировку груди, а когда тренируешь плечи или спину. Оно выполняется сидя лицом к спинке тренажера, руки отводятся назад, рукоятки отталкиваются до средней линии тела, и плавно приводятся в исходное положение.
Разбор упражнения
Анатомия
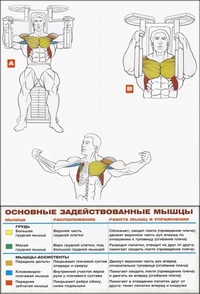
- Основной движитель – большие и малые грудные мышцы. За счет их сокращения происходит приведение плеча к центру тела, при разведении мышцы компенсируют инерционное усилие, и делают работу плавной.
- Дополнительные работающие мышцы – это передняя дельтовидная, передняя зубчатая, клювовидно-плечевая мышца, верхняя головка бицепса.

- Мышцы- стабилизаторы – широчайшие мышцы спины, ромбовидная, длинная мышца спины, прямая мышца пресса, квадрицепс и бицепс бедра, ягодичные.
Плюсы упражнения
- Возможность работать на любом уровне физического развития. Упражнение доступно и опытным бодибилдерам, и новичкам с первого дня занятий;
- Движение дает меньшую нагрузку на стабилизаторы плеча, чем сведение гантелей перед грудью. Это позволяет включать его в реабилитационные программы после травмы плеч;
- Нагрузка плавно распределяется между всеми пучками грудных мышц, и позволяет качественно их проработать;
- Отсутствует работа жимовых мышц – трицепса, и спины. Можно тренировать грудь в изоляции
Минусы упражнения
- Построить массу мышц одними «разводками» не получилось пока ни у кого. Это движение нужно как дополнение к жимам, а не как их замена;
- В упражнении не работают грудные мышцы, а вот стабилизаторы плеча отключаются. Если включать инерцию, травму все же можно получить
УПражнение дл ягрудных мышц — сведение рук в тренажере бабочка
Watch this video on YouTube
Подготовка к упражнению
Это движение завершает комплекс упражнений для мышц груди. Подразумевается, что суставная гимнастика, и предварительная растяжка делаются до первого жима. Новичкам стоит выполнять не более 12 рабочих подходов всех упражнений за тренировку, опытные атлеты могут делать больше, индивидуально подбирая нагрузку.
Подразумевается, что суставная гимнастика, и предварительная растяжка делаются до первого жима. Новичкам стоит выполнять не более 12 рабочих подходов всех упражнений за тренировку, опытные атлеты могут делать больше, индивидуально подбирая нагрузку.
Стрейчинг мышц в середине тренировки перед каким-то одним упражнением лишен всякого смысла. Обычно такие действия уменьшают силу мышечных сокращений, и снижают эффективность занятия.
Исключение – растяжка трицепса после основных жимовых движений. Нужно сесть на скамью, завести предплечье за голову и слегка надавить на локоть. Это поможет более комфортно сводить руки перед собой, но не будет снимать тонус с груди.
Правильное выполнение упражнения
Анатомически оптимальная позиция – кисти располагаются в плоскости средней линии груди. Сведение должно производиться по дугообразной траектории перед грудью. Если конструкция тренажера подразумевает возможность упора в мягкие валики предплечьями, локоть должен находиться на средней линии груди.
Можно усилить работу грудных, делая небольшие паузы в точке, где руки сведены, и статически напрягая мышцы. Но это не обязательно приведет к более существенному росту. Подобные методики подбирают индивидуально, и их результативность зависит от строения мышечной ткани атлета, преобладания определенного типа волокон.
Не нужно допускать «излома» кистей, или излишнего давления на них. Хват не должен быть слишком плотным, следует комфортно сводить руки, не зажимая рукоятки пальцами. Однако лучше использовать закрытый хват.
Не допускается отрыв лопаток от спинки, и наклон корпуса вперед. Если атлет предпочитает использовать существенные веса, стоит помочь ему «сдвинуть» руки с мертвой точки. Но эта техника не рекомендуется для новичков, и занимающихся фитнесом. Она подходит только для опытных бодибилдеров.
Эффективность движения снижается, если выполнять его рывками. При болевых ощущениях в локтях, стоит последить за тем, на сколько они согнуты, и подобрать оптимальный угол. Чем больше сгибание в локтевом суставе, тем больше задействуется бицепс в упражнении.
Чем больше сгибание в локтевом суставе, тем больше задействуется бицепс в упражнении.
Включение в программу
Программа тренировок не может строиться на одних только сведениях в тренажере. Следует включать упражнение вторым, если речь идет о новичке, который выполняет два движения на грудь, или завершающим упражнением в программу.
Кто-то предпочитает объемную работу на 12-15 повторений, в 3-4 подходах, кто-то иную раскладку – 10 повторений в 5-6 подходах. Выбор зависит от задач атлета. Десятиповторные сеты больше подходят для работы в силовом периоде, многоповторные – для тех, кто занимается только ради гипертрофии мышц.
Иногда движение используют для предварительного утомления груди в программах, направленных на гипертрофию. Подобные вещи практикуются атлетами высокого уровня. Для них же предназначены и дропсеты сведений – работа на 10-12 повторов с высоким, а затем – постепенно уменьшаемым весом.
Противопоказания
Не рекомендуется при надрывах пекторальных, растяжениях, дискомфорте в передних дельтовидных, и воспалениях плечевых суставов. Атлетам, работающим на силу, движение следует выполнять со средним или малым весом, чтобы не перетренировать грудные, и не получить травму груди на жиме.
Атлетам, работающим на силу, движение следует выполнять со средним или малым весом, чтобы не перетренировать грудные, и не получить травму груди на жиме.
Альтернатива
Многие считают, что разведение с гантелями лежа – это травмоопасное упражнение, но тут следует снизить вес гантелей, и контролировать траекторию, чтобы не получить травму. На практике, толчок спиной вперед более опасен для плеч, чем незначительное искажение траектории в сведении лежа.
Сведение ног в тренажере: техника выполнения от А до Я! для девушки и мужчины
Разобрали упражнение «Разведение ног в тренажере» сегодня же поговорим про сведение.
Данное упражнение прорабатывает внутреннюю поверхность бедер и вспомогательных мышц.
Это очень актуально для женского пола потому что внутренняя поверхность бедер – эстетически важная зона ног для женщин, и как правило, эта зона у большинства является проблемной. Дряблой, висящей, кисель, прочее.
Почему так? Потому что внутренняя сторона бедра, как правило, у всех слабая, потому что в реальной жизни она мало где задействуется, в отличие от внешней поверхности бедра. Отсюда и проблемы в виде дряблости и пр.
Отсюда и проблемы в виде дряблости и пр.
Данное упражнение НЕ БАЗОВОЕ, а изолирующее, поэтому оно если и выполняется, то только после основных базовых многосуставных упражнений на попу и бедра, а именно (для тех, кто не в курсе):
Упражнение позволит проработать бедра под другим углом; то есть, с помощью этого упражнения ты дашь бедрам другую нагрузку, такую нагрузку которую они еще не испытывали даже в базовых упражнениях.
Ну а в целом, возлагать на данное упражнение какие-то «большие» надежды даже не пытайся.
Сведение ног в тренажере: техника выполнения
Техника действительно очень простая потому что упражнение выполняется в тренажере в котором уже задана траектория движения и ты ничего не сможешь сделать как «не надо», тренажер тебе этого не даст…
Шаг #1. Выставь нужный вес в тренажере (предупреждение: из-за того, что внутренняя сторона бедра у большинства, как правило, слабая, вес может быть гораздо меньше, чем в разведениях ног, поэтому не торопись прогрессировать нагрузку, не гонись за весом, главное правильная техника выполнения самого упражнения).
Шаг #2. Отрегулируй саму конструкцию (ширину разведения-растяжения ног).
Установи её таким образом, чтобы твои мышцы были максимально напряжены.
В то же время, не нужно растягивать ширину слишком широко (по крайней мере на начальном этапе) иначе можно навредить себе, будет боль, возможно «заработаешь» себе растяжение, а это нам не нужно =)
Шаг #3. Займи положение сидя на тренажере, выпрями осанку и плотно прижмись спиной к тренажеру. Спина на протяжении выполнения упражнений ровная (держи осанку) и смотри (голова-взгляд) вперед перед собой.
Шаг #4. Расположи ноги за специальные боковые мягкие валики (упоры).
Шаг #5. Возьмись руками за ручки (рукоятки) чтобы не ёлзать во время выполнения упражнения.
Шаг #6. Начинай сводить ноги максимально до конца (как бы коленками друг к другу) и внимание: задерживайся в сведенном состоянии ног на 1-2-3 секунды, после чего медленно (под контролем) разводишь ноги обратно.
Категорически не нужно делать все резко, все должно быть под контролем.
Шаг #7. Когда разводишь ноги обратно — не доводи до конца разведение, слегка оставляй, иначе нагрузка будет теряться, работай как бы внутри амплитуды, чтобы напряжение (нагрузка) сохранялась в мышце постоянно.
Если ты будешь опускать до конца — срабатывает ограничитель — вес становится и нагрузка с мышц УХОДИТ. Нам этого не нужно, поэтому разводишь ноги не до конца, оставляй пару сантиметров (работай внутри амплитуды).
Следи за дыханием: выдох – сводишь ноги, вдох – разводишь ноги;
В конце последнего подхода (когда выполнишь нужное кол-во повторов) можешь подержать ноги в сведенном состоянии секунд 40-50 до тех пор пока ноги сами (автоматически) не начнут разводиться. То есть, держи до максимального жжения во внутренней поверхности бедра, чтобы добить мышцу до конца.
Кол-во повторов от 15-20 в диапазоне 3-4 подхода.
Напоследок рекомендую посмотреть наглядное видео по данному упражнению:
Кому не трудно / жалко, поделитесь ссылкой на эту статью в соц.сетях (соц. кнопки находятся ниже). Это лучшее, что вы можете сделать, я буду вам сильно признателен.
С ув, администратор.
Сведение рук на тренажере с подушками для предплечий — SportWiki энциклопедия
Сведение рук на тренажере с подушками для предплечий[править | править код]
Сведение рук на тренажере с подушками для предплечийОсновные характеристики упражнения:
Сведение рук на тренажере с подушками для предплечийСведение согнутых рук на тренажере в положении сидя
- Сведение рук на тренажере с подушками для предплечий — вспомогательное упражнение
- Изолирование одного сустава
- Толкательное движение
- Открытая кинетическая цепь
- Использование отягощения
- Для всех уровней — от начального до продвинутого
Наклон скамьи в этом упражнении увеличивает нагрузку на нижние пучки грудных мышц, которые поддерживают грудь и придают ей форму.
С помощью предплечий сведите подушки тренажера перед грудью. Сделайте паузу и медленно вернитесь в исходное положение. Повторите упражнение.
Исходное положение
- Сядьте на скамью тренажера. Упритесь предплечьями в подушки так, чтобы локти оказались на уровне плеч.
- Расслабьте плечи, расправьте грудь.
- Выпрямите спину, удобно поставьте ноги на опоры.
Рекомендации по выполнению
- При сведение рук на тренажере с подушками для предплечий, прежде чем увеличивать вес отягощения, научитесь правильно выполнять упражнение.
- Вес тела должен приходиться на седалищные кости, спина выпрямлена.
- Не используйте силу инерции. Движения должны быть медленными и контролируемыми.
- Не сводите и не поднимайте плечи. Грудь расправлена, лопатки опущены.
- Сводя предплечья, делайте выдох.
- Ноги для устойчивости находятся на ширине плеч.
Главные задействованные мышцы
- Лопатка: передняя зубчатая мышца, малая грудная мышца, ромбовидные мышцы, трапециевидная мышца, особенно ее нижний пучок.

- Плечевой сустав: вращающая манжета плеча, бицепс.
- Туловище: мышцы живота, ягодичные мышцы, широчайшая мышца спины.
Анализ движений[править | править код]
Основные суставы | Плечевой | Акромиально-ключичный |
Движения, совершаемые в суставах | Вперед: горизонтальное приведение, частичное приведение. Назад: горизонтальное отведение, частичное отведение. | Вперед: частичное разведение. Назад: частичное сведение. |
Главные мышцы, участвующие в движениях | Большая грудная мышца (преимущественно грудино-реберный и брюшной пучки), клювовидно-плечевая мышца, передний пучок дельтовидной мышцы | Передняя зубчатая мышца |
Упражнение Сведения рук в тренажере
Сведения рук в тренажере
Описание
Занятия в тренажёре Peck-Deck придадут Вашим грудным мышцам дополнительной полосатости, выделят их внутренние края и отчётливо разделят левую и правую грудные мышцы, по центру тела.
Виды спорта, для которых мышцы, задействованные в этом упражнении, играют основополагающую роль: Гимнастике, бейсбол, бокс, теннис, бадминтон, сквош.
Техника выполнения упражнения
Если вы решили заниматься на этом тренажёре, в первую очередь, нужно отрегулировать высоту сидения так, чтобы при взятии за рукоятки, верхние части руки были на одном уровне с плечами, а локти и предплечья прижимались к подушкам для рук.
Сев на тренажер держите спину ровно, так, чтобы она и голова прижимались к спинке тренажера, ноги должны стоять шире плеч, а ступни быть строго под коленями (угол в коленях, при этом, прямой). После того как Вы сделали вдох и задержали дыхание, нужно свести упоры для рук перед грудью. Сделайте выдох после того как преодолеете наитруднейший участок движения.
В тот момент, когда Ваши локти максимально близко, друг от друга, задержите их в таком положении на 1-2 секунды и напрягите мышцы груди ещё сильнее. Немного расслабив мышцы, позвольте рукояткам плавно развести Ваши локти, пока они не окажутся наравне с плечами или чуть за спиной.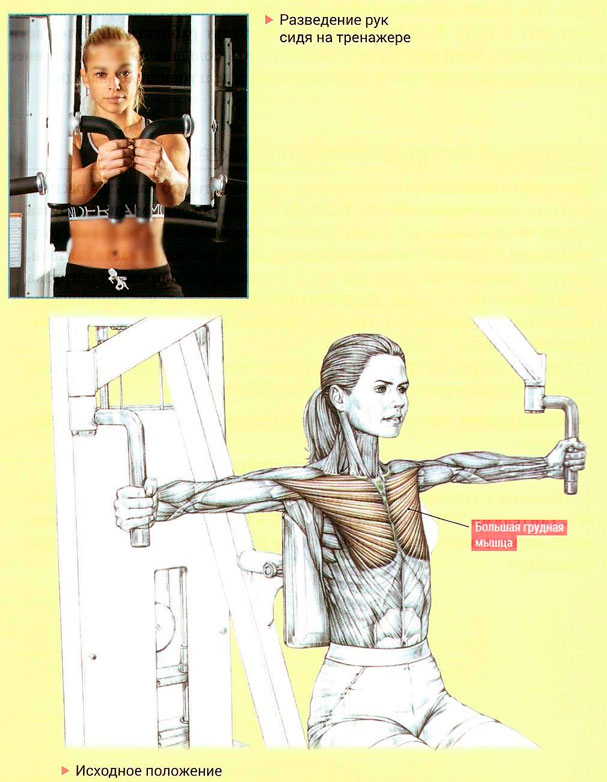 Когда Вы достигните этой точки, остановитесь и опять сведите локти.
Когда Вы достигните этой точки, остановитесь и опять сведите локти.
Рекомендации
Чтобы укрепить положение торса и увеличить спину, вдохните и задержите дыхание во время сведения. Когда Ваша спина плотно прижата к спинке тренажера, положение торса стабилизируется, а мышцы груди становятся сильнее. Если Вы делаете вдох и задерживаете дыхание, во время сведения, это значительно укрепляет положение торса и увеличивает силу.
Изображения
Если у вас имеются знания\информация по данной тематике и Вы готовы помочь проекту добавьте материал личноВидео
Как создавать жесты в симуляторе iOS
- Веб-дизайн и разработка
- Мобильные приложения
- Как создавать жесты на симуляторе iOS
Нил Голдштейн, Дэйв Уилсон
Когда вы запускаете приложение на iOS Simulator, вы должны использовать различные действия для имитации жестов, которые вы обычно используете. На реальном устройстве жест — это то, что вы делаете пальцами, чтобы что-то происходило на устройстве — касание, перетаскивание, смахивание и т. Д.В таблице показано, как имитировать жесты с помощью мыши и клавиатуры.
| Жест | iPad Экшен |
|---|---|
| Метчик | Щелкните мышью. |
| Нажмите и удерживайте | Удерживайте кнопку мыши нажатой. |
| Двойное нажатие | Дважды щелкните кнопкой мыши. |
| Метчик двумя пальцами | 1. Наведите указатель мыши на то место, где вы хотите начать Наведите указатель мыши на то место, где вы хотите начать . 2. Удерживая нажатой клавишу Option, появятся два кружка, обозначающие вместо ваших пальцев. 3. Щелкните кнопкой мыши. |
| Проведите | 1. Щелкните в том месте, где хотите начать, и удерживайте кнопку мыши . 2. Медленно переместите мышь в направлении движения, а затем отпустите кнопку мыши. |
| Щелчок | 1. Щелкните в том месте, где хотите начать, и удерживайте кнопку мыши нажатой. 2. Быстро переместите мышь в направлении движения, а затем отпустите кнопку мыши. |
| Перетащите | 1. Щелкните в том месте, где хотите начать, и удерживайте кнопку мыши . 2. Медленно перемещайте мышь в направлении перетаскивания. |
| Щипок | 1. Наведите указатель мыши на то место, где вы хотите начать . 2. Удерживая нажатой клавишу Option, появятся два кружка, обозначающие вместо ваших пальцев.  3. Удерживая кнопку мыши, переместите круги внутрь (чтобы зажать) или наружу (чтобы разблокировать). |
Об авторе книги
Джесси Фейлер — разработчик, консультант и автор, специализирующийся на технологиях Apple.Он является создателем Minutes Machine для iPad, приложения для управления собраниями и Saranac River Trail, и его регулярно слышат на общественном радио WAMC для Северо-восточного Круглого стола.
Что такое сетевое моделирование? (с рисунком)
Моделирование сети — это виртуальное представление сети. Существует два распространенных типа моделирования сети: один используется в существующих сетях, а другой используется до построения сети. Целью этого моделирования является обнаружение проблем в существующей сети или обнаружение неожиданных взаимодействий в сети, которая еще не создана.Обнаруживая существующие проблемы или предотвращая их в первую очередь, компании могут повысить надежность сети и снизить затраты на обслуживание.
Сетевое моделирование — это концепция, которая возникла в первых крупномасштабных компьютерных сетях. В те дни люди не знали, как большие системы данных будут взаимодействовать при полном использовании. Эти симуляции должны были помочь дизайнерам найти подходящее оборудование для проекта. Шло время, и сети становились больше, поэтому требовалось моделирование для поиска проблемных участков до и после строительства.
При использовании до построения сети моделирование сети иногда называют эмулятором сети или генератором трафика. В этих симуляциях используются математические алгоритмы для построения графика работы сети при использовании. Информация о профиле всех сетевых компонентов компании вводится в систему вместе с основными данными пользователя. Затем программа генерирует довольно точный отчет о том, как сеть будет работать при использовании.
Если программы используются после того, как сеть заработала, информация будет еще более точной.Программное обеспечение работает во всей сети, обнаруживая все физические части системы и пользователей сети. Он берет эту информацию и генерирует выходные данные об использовании сети в виде дорожной карты. На этой карте показаны все местоположения, которые недостаточно или перегружены, а также указаны узкие места и модели использования пользователями.
направлена на экономию денег и поиск недостатков.Программное обеспечение составляет карту сети, определяя места, где необходимо выполнить работу или где необходимо изменить дизайн. Эта неэффективность может вызвать замедление работы сети и сбои. Кроме того, они связывают вспомогательный персонал, который может заниматься другими делами.
Существует два основных способа экономии денег при моделировании сети.Планируя сети до их построения и периодически отслеживая их после, компании могут сэкономить много денег. Эффективная сеть увеличивает производительность, предоставляя сотрудникам необходимую информацию именно тогда, когда она им нужна. Это также снижает нагрузку на обслуживающий компьютер. Это освобождает их для других задач и сокращает их количество, необходимое для эффективного обслуживания систем бизнеса.
Эффективная сеть увеличивает производительность, предоставляя сотрудникам необходимую информацию именно тогда, когда она им нужна. Это также снижает нагрузку на обслуживающий компьютер. Это освобождает их для других задач и сокращает их количество, необходимое для эффективного обслуживания систем бизнеса.
luizmonteiro — Онлайн симуляторы — HSI Simulator
Модель HSI (индикатор горизонтального положения) Simulato r была разработана для демонстрации приблизительной индикации того, что HSI будет отображать различные положения самолета относительно определенных навигационных средств.Если у вас есть широкополосное соединение, посмотрите демонстрационный фильм VOR Simulator, щелкнув ссылку под
Демонстрация шаблона удержания имитатора HSI
(Требуется Flash — Продолжительность: 12 минут — Размер: 82 МБ — настоятельно рекомендуется широкополосное подключение к Интернету)
Краткие инструкции: (версию для печати щелкните здесь)
Выберите желаемый тип и настройки Navaid.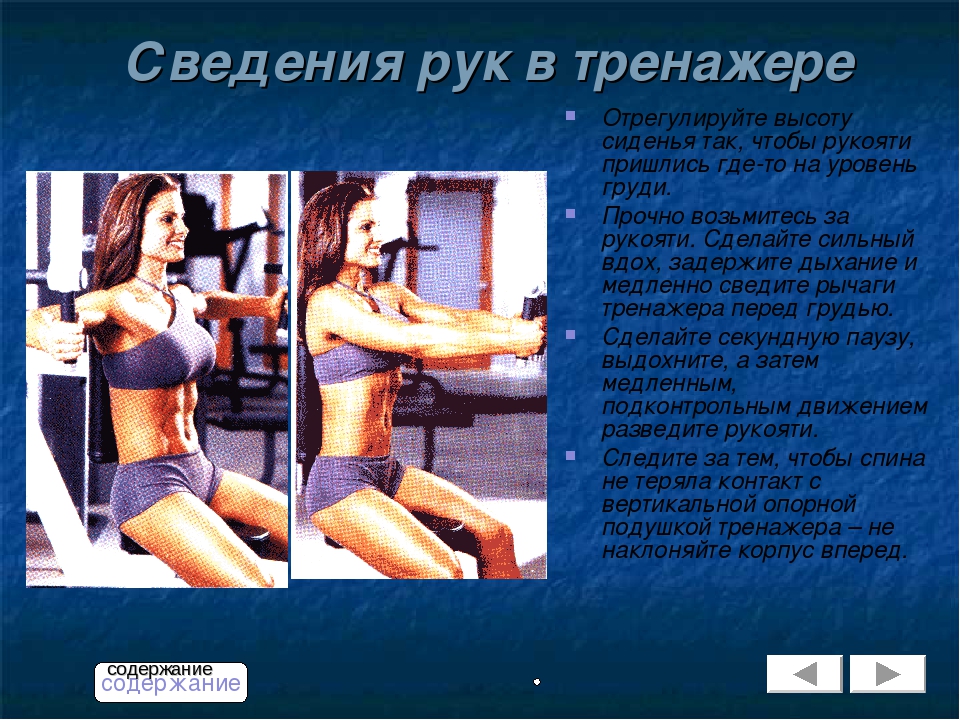 Перетащите самолет на горизонтальные или вертикальные панели, чтобы изменить положение самолета по отношению к объекту.Если выбрано North Up изменения курса самолета можно установить, поместив курсор рядом с самолетом на горизонтальной панели, а затем нажав кнопку, когда появится знак «-» или «+». Если выбран Направление вверх , изменение курса самолета можно установить, поместив курсор рядом с навигационным средством на горизонтальной панели, а затем нажав кнопку, когда появится «-» или «+».
Перетащите самолет на горизонтальные или вертикальные панели, чтобы изменить положение самолета по отношению к объекту.Если выбрано North Up изменения курса самолета можно установить, поместив курсор рядом с самолетом на горизонтальной панели, а затем нажав кнопку, когда появится знак «-» или «+». Если выбран Направление вверх , изменение курса самолета можно установить, поместив курсор рядом с навигационным средством на горизонтальной панели, а затем нажав кнопку, когда появится «-» или «+».
Кроме того, есть два новых способа установки курса самолета :
1.Двойной щелчок по самолету приведет к открытию небольшого окна рядом с самолетом с текущим заголовком в поле редактирования. Изменение значения в поле редактирования на любое значение от 1 до 360 изменит курс самолета на этот курс.
2. Удерживая нажатой клавишу Shift и перемещая курсор к центру самолета, вы увидите синюю стрелку, идущую от центра самолета, с текущим направлением стрелки от самолета в градусах, отображаемых на линии. Удерживая нажатой клавишу Shift и перемещая курсор мыши по карте, стрелка, исходящая от летательного аппарата, будет следовать за мышью, постоянно показывая направление от самолета.Щелчок кнопкой мыши изменит курс самолета на текущее направление синей линии. Отпустите кнопку Shift, чтобы скрыть синюю линию.
Удерживая нажатой клавишу Shift и перемещая курсор мыши по карте, стрелка, исходящая от летательного аппарата, будет следовать за мышью, постоянно показывая направление от самолета.Щелчок кнопкой мыши изменит курс самолета на текущее направление синей линии. Отпустите кнопку Shift, чтобы скрыть синюю линию.
Ручки устанавливаются таким же образом, как и курс самолета (как описано выше), за исключением того, что вместо того, чтобы помещать мышь на символ самолета, мышь помещается на ручку.
Вы можете использовать клавиатуру для управления движением самолета. Ниже приведены ключи, управляющие самолетом:
ВАЖНОЕ ПРИМЕЧАНИЕ УПРАВЛЕНИЯ С КЛАВИАТУРЫ. Для работы команд с клавиатуры необходимо нажать кнопку запуска симулятора, а значок вертящегося вокруг земного шара летательного аппарата должен двигаться.Кроме того, если щелкнуть за пределами симулятора (например, щелкнуть полосу прокрутки браузера, текст или любую другую область за пределами), браузер может перестать отправлять команды клавиатуры на симулятор. Вы должны щелкнуть любую пустую часть симулятора, чтобы браузер мог передавать ему команды с клавиатуры. Вы также можете перетаскивать и перемещать самолет, даже если он движется.
Когда выбран Heading Up , даже если может показаться, что летательный аппарат вращается вокруг навигационного объекта, он остается в том же положении при изменении курса.Причина этого в том, что на дисплее всегда отображается средство навигации в центре дисплея. Это означает, что независимо от того, выбран ли North Up или Heading Up , положение самолета всегда будет относительно навигационного средства.
Ручки устанавливаются таким же образом, как и курс самолета (как описано выше), за исключением того, что вместо того, чтобы помещать мышь на символ самолета, мышь помещается на символ ручек.
Общее описание функций:
Compass Rose — Используется в качестве вспомогательного средства для отображения ориентации панели горизонтальной навигации. Служит той же цели
Служит той же цели
в качестве символа компаса на маршрутных картах по ППП, чтобы показать направление относительно магнитного севера.
В / из региона — показывает на панели горизонтальной навигации области, в которых будет отображаться флаг HSI
От до или От в зависимости от того, где находится самолет.
Показать OBS CRS To / From — Показывает линию, указывающую направление курса «к» (синий) и «от» (зеленый).
Флажки проекции — пластины захода на посадку по ППП имеют вид профиля, который отображает боковую вертикальную проекцию захода на посадку
курс. Флажки проекции помогают визуализировать, как и где эта проекция сделана на горизонтальной панели
.
Посмотреть. Обратите внимание на то, как летательный аппарат перемещается на горизонтальной панели, когда его перетаскивают на вертикальную панель и тиски
наоборот. Движение осуществляется в соответствии с выступами флажков.
Горизонтальная панель — Отображает горизонтальное положение ЛА относительно навигационного объекта то же
так, как это сделали бы карта полета по ППП или план подходной пластины.
Вертикальная панель — Отображает вертикальное положение ЛА относительно навигационного объекта то же
так, как выглядел бы профиль подходной пластины. Используется в нескольких целях:
1.Для функции глиссады.
2. DME измеряет наклонную дальность от самолета до объекта. Возможность контролировать высоту позволяет
вы должны определить его влияние и, следовательно, связанную с ним ошибку.
Тип навигационного средства — Выбирает тип навигационного средства. Некоторые функции, такие как DME или глиссада, будут работать только
с определенными типами помещений.
Раздел общих настроек — Выберите и активируйте различные функции, такие как установка ветра, просмотр треугольника ветра, масштабирование карты и многое другое.
Раздел «Другие настройки» — Содержит дополнительные настройки, такие как шаблон схемы удержания.
Навигационная информация — Отображает такую информацию, как радиальный, настройки OBS и многое другое.
Производительность — При использовании компьютеров, которые могут быть медленнее, этот раздел можно использовать для повышения скорости и процессора
использование за счет увеличения предустановленных параметров, таких как частота обновления экрана и уменьшение размера траектории движения самолета.На более быстром
компьютеры, вы можете воспользоваться преимуществами более плавной анимации и большего пути трассировки.
Память — Позволяет сохранить в памяти моментальный снимок положения и настроек ЛА. В большинстве браузеров памяти останется даже
если вы закроете страницу и загрузите ее позже, вы сможете продолжить с того места, на котором остановились. Примечание: для пользователей luizmonteiro. com
com
Симулятор навигации Функция памяти не сохраняется при закрытии симулятора, поскольку вы можете сохранить настройки в файл.
* Обратите внимание, что DME может отсутствовать вместе с курсовым радиомаяком, курсовым радиомаяком, заходами на посадку LDA или SDA. Показанное расстояние по DME является приблизительным значением, которое DME указывал бы, если бы такое навигационное средство было размещено рядом.
ВНИМАНИЕ: Поведение HSI и другая отображаемая информация является приблизительной только для целей иллюстрации и может не отражать фактические показания HSI и DME.
SITL Simulator (программное обеспечение в цикле) — документация разработчика
Симулятор SITL (программное обеспечение в цикле) позволяет запускать Plane,
Коптер или вездеход без какого-либо оборудования.Это сборка автопилота
код с использованием обычного компилятора C ++, что дает вам собственный исполняемый файл, который
позволяет протестировать поведение кода без оборудования.
В этой статье представлен обзор преимуществ и архитектуры SITL.
Обзор
SITL позволяет запускать ArduPilot на вашем ПК напрямую, без каких-либо специальное оборудование. Он использует тот факт, что ArduPilot — это портативный автопилот, который может работать на самых разных платформах. Ваш компьютер — это еще одна платформа, на которой можно построить и запустить ArduPilot.
При работе в SITL данные датчика поступают из модели динамики полета. в авиасимуляторе. ArduPilot имеет широкий спектр симуляторов транспортных средств. встроенный и может взаимодействовать с несколькими внешними симуляторами. Это позволяет ArduPilot будет протестирован на самых разных типах транспортных средств. За Например, SITL может моделировать:
- Самолет многороторный
- Самолет с фиксированным крылом
- наземных транспортных средств
- подводных аппаратов
- подвес для камеры
- антенные трекеры
- широкий спектр дополнительных датчиков, таких как лидары и оптический поток датчики
Добавить новые смоделированные типы транспортных средств или типы датчиков несложно.
Большим преимуществом ArduPilot на SITL является то, что он дает вам доступ к полной ряд инструментов разработки, доступных для разработки на C ++ для настольных ПК, таких как интерактивные отладчики, статические анализаторы и инструменты динамического анализа. Этот значительно упрощает разработку и тестирование новых функций в ArduPilot.
Запуск SITL
Среда ArduPilot SITL была разработана для работы на обоих Linux и Windows. Инструкции по настройке см. В разделе Настройка SITL. для дополнительной информации.Использование SITL объясняется в разделе Использование SITL. Примеры запуска и использования SITL для конкретного транспортного средства см. В разделе «Примеры использования SITL для транспортного средства».
Архитектура SITL
Примечание на изображении ниже номера портов являются ориентировочными и могут
варьироваться. Например, порты между ArduPilot и симулятором
на изображении — 5501/5502, но они могут отличаться от 5504/5505 или других
номера портов в зависимости от вашей среды.
Веб-симулятор
Tizen Web Simulator — это легкий инструмент, который предоставляет множество настроек и функций для разработки веб-приложений.Вы можете использовать функции симулятора для отладки своих приложений.
Веб-симулятор Tizen:
- Поддерживает запуск и отладку современных веб-приложений HTML5.
- Имитирует веб-API Tizen с помощью серверной части JavaScript. Для получения дополнительной информации о Tizen Web API, поддерживаемых симулятором, см. Раздел Tizen API Coverage.
- Включает панели конфигурации для отправки событий и сообщений для функций отладки, таких как геолокация, акселерометр и обмен сообщениями.
- Работает на Google Chrome ™.
- Предоставляет предпочтения, позволяющие настроить его работу.
Веб-симулятор Tizen основан на Ripple-UI Framework и находится под лицензией Apache Software License v.2.0.
| Примечание |
|---|
Веб-симулятор не поддерживает носимый круговой пользовательский интерфейс. |
Рисунок: Tizen Web Simulator
Настройки веб-симулятора
Web Simulator имеет несколько настроек для разработки веб-приложений.
Панель навигации приложения
Панель навигации приложения используется для загрузки приложения, просмотра истории просмотра и изменения конфигурации и параметров видимости Web Simulator.
Панель навигации имеет следующие параметры:
- Адресная строка
Когда Web Simulator запускается из Tizen IDE, путь к главному файлу вашего приложения отображается в адресной строке. Вы можете редактировать это поле, чтобы изменить файл или проект, который нужно запустить.
- Кнопка перезагрузки
Перезагружает текущее приложение.
- История просмотров
Нажмите кнопку истории, чтобы просмотреть ранее запущенные приложения.
- Кнопка конфигурации
Открывает окно конфигурации веб-симулятора.

- Кнопка видимости панели
Открывает окно видимости панели.
- Информационная кнопка
Открывает информационное окно Web Simulator.
Параметры конфигурации симулятора
В окне конфигурации Web Simulator можно изменить следующие параметры конфигурации:
- Управление конфигурацией
Сохраните настройки конфигурации в локальном хранилище и восстановите настройки позже.
- Настройки устройства
Задайте API устройства и разрешение устройства для имитации разрешения целевого устройства на вкладке УСТРОЙСТВО .
Примечание Чтобы обеспечить аналогичный рендеринг пользовательского интерфейса на эмуляторе и целевом устройстве, установите разрешение эмулятора на tizen WVGA (480×800) или tizen HD (720×1280) , поскольку свойство области просмотра этих разрешений настроено таким же как целевое устройство. 
- Системные настройки
API системной информации Tizen (для мобильных и носимых приложений) используется для получения информации об устройстве и сети.Используйте вкладку НАСТРОЙКИ СИСТЕМЫ , чтобы установить состояние устройства и проверить, может ли ваше приложение получить текущий статус устройства. Вы также можете протестировать функции прослушивателя приложений для уведомлений об изменении статуса.
На вкладке НАСТРОЙКИ СИСТЕМЫ можно изменить следующие параметры конфигурации системы:
- CONFIG
Управление вибрацией устройства и состоянием блокировки экрана.
- CPU
Ручная установка загрузки CPU.Если установлено значение 0, ЦП простаивает. Если установлено значение 1, загрузка ЦП составляет 100%.
- BUILD , LOCALE , DEVICE ORIENTATION , STORAGE , and DISPLAY
Отображение типа сборки, языка, страны, ориентации дисплея, точек на дюйм (DPI), а также ширины и высоты устройства.
 Вы также можете установить яркость дисплея и атрибуты хранения.
Вы также можете установить яркость дисплея и атрибуты хранения. - ПЕРИФЕРИЯ
Отображение и установка видеовыхода.
- CONFIG
- Параметры сети
Задайте тип сети, сеть Wi-Fi, сотовую сеть и параметры конфигурации, связанные с SIM-картой, на вкладке СЕТЬ .
Настройки симулятора
Чтобы просмотреть настройки Tizen Web Simulator, выберите Window> Preferences> Tizen SDK> Web> Simulator в Web IDE.
Настройки Google Chrome ™
В этом разделе вы можете изменить настройки, связанные с Google Chrome ™.
Google Chrome ™ Местоположение
Введите полный путь к программе Google Chrome ™. При первом запуске Tizen SDK пытается определить местоположение. Однако может потребоваться ввести или изменить это значение вручную.
- Для Linux: / opt / google / chrome / google-chrome.

- Для 64-разрядной версии Windows®: C: \ Program Files (x86) \ Google \ Chrome \ Application \ chrome.exe
- Для 32-разрядной версии Windows®: C: \ Program Files \ Google \ Chrome \ Application \ chrome.исполняемый
Симулятор запускается с параметрами по умолчанию, включая параметры, описанные в следующей таблице.
| Параметры | Описание |
|---|---|
| — разрешить доступ из файлов | Позволяет API-интерфейсам JavaScript симулятора получать доступ к файлам на диске (таким как config.xml и значок приложения). |
| —disable-web-security | Позволяет симулятору выполнять междоменные запросы (например, получать доступ к местоположению карты на другом сервере). |
Чтобы добавить дополнительные параметры запуска, введите их в это поле.
Расположение данных профиля
Введите полный путь к каталогу симулятора для хранения пользовательских настроек и данных веб-приложения.
| Примечание |
|---|
| Пользователи Linux должны вручную определить этот параметр вместо использования значения по умолчанию, так как общая длина пути к каталогу в Linux для этого параметра очень ограничена.Использование значения по умолчанию может предотвратить одновременный запуск более одного приложения. В версии для Windows® такого ограничения нет. |
Настройки имитатора
В этом разделе вы можете изменить настройки, связанные с симулятором:
- Местоположение симулятора
Укажите, следует ли использовать версию симулятора по умолчанию или пользовательскую версию.
- Внутренний: используйте симулятор, входящий в состав Tizen SDK.
- Внешний: используйте пользовательскую сборку или другую версию симулятора.
 Введите полный путь к файлу index.html той версии, которую вы хотите использовать.
Введите полный путь к файлу index.html той версии, которую вы хотите использовать.
Выбор Симулятор запуска в режиме приложения Google Chrome ™ запускает симулятор без строки URL-адреса Google или вкладок вверху. В результате симулятор появляется как отдельное приложение. Эта настройка не влияет на функции симулятора.
Tizen API Покрытие
Ниже приводится сводка API-интерфейсов Tizen, поддерживаемых в этом выпуске.Некоторые API-интерфейсы поддерживаются серверной частью JavaScript, а другие предоставляются Google Chrome ™. Tizen также поддерживает спецификации W3C / HTML5.
Поддерживаемый API веб-устройств Tizen
В симуляторе на JavaScript реализованы следующие API:
Не поддерживается Tizen Web Device API
Следующие API-интерфейсы не поддерживаются текущей версией симулятора. Поддержка этих API находится в стадии разработки.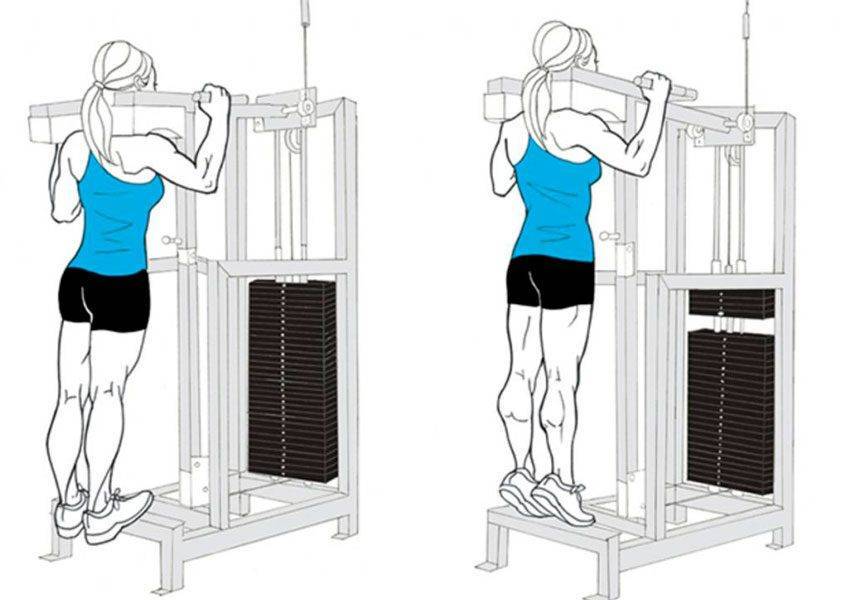
- Порт сообщений
- Защитный элемент
Известные проблемы веб-симулятора
API-интерфейсы Tizen имеют следующие известные проблемы в веб-симуляторе:
- Не все свойства, специфичные для Tizen, поддерживаются в конфигурации веб-симулятора.xml файл конфигурации. Однако синтаксис и значения всех свойств, специфичных для Tizen, проверяются. Результат проверки отображается на панели Application Configuration редактора конфигурации виджета.
- Одновременно можно запускать только 1 приложение. Если ваше приложение использует API приложения для вызова другой службы или приложения, используйте функции веб-симулятора для моделирования результатов для требуемых обратных вызовов. Методы API времени, связанные с
- DST (переход на летнее время), не поддерживаются.
- Для модуля обмена сообщениями вложение не поддерживается, а тело сообщения загружается всегда.
- Если вы используете компонент jQuery Mobile смахивания, действие смахивания имитируется событиями щелчка и отмены щелчка мыши.
 jQuery Mobile не распознает действия смахивания, если они начинаются или заканчиваются за пределами компонента, а также если указатель мыши перемещается медленно или не по прямой линии.
jQuery Mobile не распознает действия смахивания, если они начинаются или заканчиваются за пределами компонента, а также если указатель мыши перемещается медленно или не по прямой линии.
Спецификации W3C / HTML5
Поддерживаются следующие спецификации W3C / HTML5:
Виджет:
- Контент (документы, графика, мультимедиа):
- HTML5 аудио
- HTML5 видео
- Формы HTML5
- API истории сеансов
- HTML5 2D холст
- Встроенный SVG
- CSS3:
- CSS3 2D-преобразования
- CSS3 3D-преобразования
- CSS3 анимация
- CSS3 переходов
- Атрибут песочницы iframe
- HTML5 2D холст
- цветов CSS3
- Интеграция устройства / ОС:
- Спецификация API геолокации
- Ориентация и ускорение
- Браузер onLine State
- Вибрация API
- Веб-аудио
- Веб-уведомления
- Сеть и связь:
- API WebSocket
- Обмен сообщениями через Интернет
- XMLHttpRequest, уровень 2
- Совместное использование ресурсов между источниками (CORS)
- События, отправленные сервером
- Хранение:
- Интернет-хранилище
- Файловый API
- File API: каталоги и система
- File API: писатель
- Кэш приложения HTML5
- База данных Web SQL
- Индексированная БД API
- Производительность:
- Веб-работники
- API видимости страницы (через серверную часть JavaScript)
- Контроль времени анимации
tum_simulator — ROS Wiki
Обзор
Этот пакет содержит реализацию симулятора беседки для Ardrone 2. 0 и был написан Хонгронг Хуанг и Юрген Штурм из группы компьютерного зрения Технического университета Мюнхена.
0 и был написан Хонгронг Хуанг и Юрген Штурм из группы компьютерного зрения Технического университета Мюнхена.
Этот пакет основан на пакете ROS tu-darmstadt-ros-pkg Йоханнеса Мейера и Стефана Кольбрехера и симуляторе Ardrone, предоставленном Маттиасом Ньивенхейзеном.
Симулятор может имитировать как AR.Drone 1.0, так и 2.0, однако параметры по умолчанию к настоящему времени оптимизированы для AR.Drone 2.0. Вы можете уточнить подробности в моем отчете.
Тренажер находится на платформе simulator_gazebo.Перед использованием этого тренажера рекомендуется больше узнать о тренажере, прочитав учебные пособия по беседке. Кроме того, вы можете получить больше информации о летающих роботах и AR.Drone из лекции по визуальной навигации для летающих роботов.
Настоящая структура квадрокоптера: AR.Drone2.0 подключается к компьютеру через WIFI, а пользователь управляет джойстиком, который через USB соединяется с тем же компьютером. На этом компьютере запущена ROS.
Моделирование манипуляций с квадрокоптером: после запуска моделирования. Пользователь может использовать джойстик для управления моделируемым квадрокоптером. Функции кнопок джойстика такие же, как и у реального AR.Drone2.0.
В следующем видео показан эксперимент о том, как симулятор работает по сравнению с настоящим AR.Drone.
Узлы
gazebo, ground_truth_to_tf, robot_state_publisher: Программа-симулятор.
rviz: Среда трехмерной визуализации для моделирования летающих роботов.
- joy_node, ardrone_joystick: они являются драйвером джойстика и транслятором информации о командах для Ardrone.
Краткое руководство
Установка
На вашем компьютере должен быть установлен пакет ROS и simulator gazebo. Версия ROS должна быть fuerte, а версия плагина ROS Gazebo (для fuerte — 1.0.2). Убедитесь, что rviz также установлен.
1. Установите следующие дополнительные необходимые пакеты в рабочую область ROS.
$ cd ~ / catkin_ws / src $ git clone https://github.com/AutonomyLab/ardrone_autonomy.git -b indigo-devel $ cd ~ / catkin_ws $ rosdep install --from-paths src -i $ catkin_make
- пакеты joy_node и ardrone_joystick
# cd в корневой каталог ros roscd # клонировать репозиторий svn checkout https: // svncvpr.informatik.tu-muenchen.de/cvpr-ros-pkg/trunk/ardrone_helpers # добавить в путь ros (если требуется) экспорт ROS_PACKAGE_PATH = $ ROS_PACKAGE_PATH: `pwd` / ardrone_helpers # сборка пакета rosmake ardrone_joystick rosmake joy
2. Установите пакет tum_simulator:
# cd в корневой каталог ros roscd # клонировать репозиторий git clone https://github.com/tum-vision/tum_simulator.git # добавить в путь ros (если требуется) экспорт ROS_PACKAGE_PATH = $ ROS_PACKAGE_PATH: `pwd` / tum_simulator # сборка пакета rosmake cvg_sim_gazebo_plugins rosmake message_to_tf
Run Simulator
Вы можете запустить симулятор с одним из следующих сценариев полета:
roslaunch cvg_sim_test 3boxes_room.Запуск
roslaunch cvg_sim_test outdoor_flight.launch
roslaunch cvg_sim_test tum_kitchen.launch
roslaunch cvg_sim_test tum_kitchen_with_marker.launch
roslaunch cvg_sim_test garching_kitchen.launch
roslaunch cvg_sim_test garching_kitchen_with_marker.launch
roslaunch cvg_sim_test wg_collada.launch
roslaunch cvg_sim_test competition.launch
Ручное управление
Управление джойстиком PS3
После запуска квадрокоптером можно управлять с помощью джойстиков:
roslaunch ardrone_joystick teleop.запуск
- Кнопка L1 запускает квадрокоптер. Он также работает как кнопка мертвого человека, так что робот приземлится, если вы отпустите ее во время полета.
- Левый джойстик может использоваться для управления скоростью vx / vy. Имейте в виду, что эти скорости даны в локальном кадре дрона!
- Правый джойстик контролирует скорость рыскания и высоту.
- Кнопка выбора может использоваться для переключения между двумя камерами.

Терминальное командное управление
rostopic pub -1 / ardrone / takeoff std_msgs / Empty
rostopic pub -1 / ardrone / land std_msgs / Empty
rosservice call / ardrone / togglecam
# fly forward
rostopic pub -r 10 / cmd_vel geometry_msgs / Twist '{linear: {x: 1.0, y: 0,0, z: 0,0}, угловой: {x: 0,0, y: 0,0, z: 0,0}} '
# лететь назад
rostopic pub -r 10 / cmd_vel geometry_msgs / Twist '{linear: {x: -1.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}'
# лететь налево
rostopic pub -r 10 / cmd_vel geometry_msgs / Twist '{linear: {x: 0.0, y: 1.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}'
# лететь вправо
rostopic pub -r 10 / cmd_vel geometry_msgs / Twist '{linear: {x: 0.0, y: -1.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}'
# взлетать
rostopic pub -r 10 / cmd_vel geometry_msgs / Twist '{linear: {x: 0.0, y: 0,0, z: 1,0}, угловой: {x: 0,0, y: 0,0, z: 0,0}} '
# летать вниз
rostopic pub -r 10 / cmd_vel geometry_msgs / Twist '{linear: {x: 0. 0, y: 0.0, z: -1.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}'
# вращение против часовой стрелки
rostopic pub -r 10 / cmd_vel geometry_msgs / Twist '{linear: {x: 0.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.0}}'
# вращение по часовой стрелке
rostopic pub -r 10 / cmd_vel geometry_msgs / Twist '{linear: {x: 0.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: -1.0}}'
# стоп
rostopic pub -r 10 / cmd_vel geometry_msgs / Twist '{linear: {x: 0.0, y: 0,0, z: 0,0}, angular: {x: 0,0, y: 0,0, z: 0,0}} '
0, y: 0.0, z: -1.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}'
# вращение против часовой стрелки
rostopic pub -r 10 / cmd_vel geometry_msgs / Twist '{linear: {x: 0.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.0}}'
# вращение по часовой стрелке
rostopic pub -r 10 / cmd_vel geometry_msgs / Twist '{linear: {x: 0.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: -1.0}}'
# стоп
rostopic pub -r 10 / cmd_vel geometry_msgs / Twist '{linear: {x: 0.0, y: 0,0, z: 0,0}, angular: {x: 0,0, y: 0,0, z: 0,0}} 'Мониторинг датчиков робота
Для наблюдения можно использовать следующие команды:
# Камера вывода rosrun image_view image_view изображение: = / ardrone / image_raw # Фронтальная камера rosrun image_view image_view изображение: = / ardrone / front / image_raw # Нижняя камера rosrun image_view image_view изображение: = / ardrone / bottom / image_raw # Датчик высоты ростопическое эхо / sonar_height # Информация о навигации rostopic echo / ardrone / navdata # Файл запуска для драйверов джойстика и узлов просмотра изображений roslaunch cvg_sim_test demo_tool.запустите
ИЛИ с помощью инструмента rviz.
Устранение неисправностей
Ошибка запуска симулятора
Если вы получаете следующее сообщение об ошибке при запуске симулятора, вам следует закрыть все другие узлы, которые подключают симулятор некоторыми топиками ROS. И попробуйте еще раз запустить файл симулятора. Более того, вы можете завершить работу мастера ROS, даже закрыть все окна терминала и снова перезапустить симулятор.
[gazebo-1] процесс умер [pid 1297, код выхода 134, cmd / opt / ros / fuerte / stacks / simulator_gazebo / gazebo / scripts / gazebo / usr / stud / huangho / ros_workspace / cvpr-ros-internal / ствол / cvg_simulator / cvg_sim_gazebo / миров / garching_kitchen.мир __name: = gazebo __log: = / usr / stud / huangho / .ros / log / 0a453de4-47a9-11e2-bff7-d4bed998ce90 / gazebo-1.log]. файл журнала: /usr/stud/huangho/.ros/log/0a453de4-47a9-11e2-bff7-d4bed998ce90/gazebo-1*.log
Не удается управлять дроном с помощью джойстика
- проверьте, используете ли вы правильный джойстик
- проверьте, правильно ли работает драйвер джойстика и отправляете правильные rostopics
rostopic echo / joy
- проверьте, правильно ли работает узел ardrone_joystick, проверив следующее темы
rostopic echo / cmd_vel rostopic echo / ardrone / land rostopic echo / ardrone / сброс rostopic echo / ardrone / takeoff
смоделированный ardrone делает что-то странное
- используйте rxgraph, чтобы увидеть, не отправляют ли другие узлы неправильные темы команд.
Невозможно запустить пакет (от Патрика Ленера)
— установка Gazebo 1.6.0 не требуется (хотя его зависимость может быть libbullet), так как запуск gazebo через ROS всегда будет использовать версию Gazebo плагина ROS (для fuerte это 1.0.2)
— Gazebo ( и, как следствие, симулятор ТУМ) очень требователен к установленной видеокарте; насколько мы можем судить в настоящее время, действительно работают только карты Nvidia (и только с ограниченным драйвером Nvidia), карты ATI / AMD и Intel не будут работать, поскольку драйверы не имеют всех возможностей OpenGL / FireGL, которые требуются Gazebo .В случае с драйверами ATI мы наблюдали сообщения об ошибках об отсутствии функций GL, но с драйверами Intel Gazebo просто выходит из строя (или, скорее, возникает ошибка драйвера Intel, и Gazebo завершает работу без каких-либо значимых сообщений об ошибке). — драйвер ardrone_autonomy (т.е. исполняемый файл ardrone_driver) несовместим с 64-битными системами (см. https://projects.ardrone.org/issues/show/140)
Примечания
Из-за ограничений симулятора беседки не все датчики AD.Drone на 100% смоделированы в симуляции.
По сравнению с реальным драйвером AD.Drone ardrone_autonomy, симуляция также может отправлять как реальный AD.Drone с теми же именами:
- Информация о передней камере и данные изображения
- Информация о нижней камере и данные изображения
- Информация об активированной камере и данные изображения
- Данные IMU
- данные tf
- Данные навигации
Навигационные данные / ardrone / navdata содержат много информации.
- метка времени сообщения
- идентификатор кадра сообщения
- режим полета (частично)
- процент заряда батареи
- положение, вращение
- скорость
- ускорение
реализовано.
- информация о магните
- давление
- информация о ветре
- теги
не реализованы.
